Digitaalne potentsiomeeter on a muutuv takistimille harja positsiooni saab mikrokontrolleri abil programmeliselt seada. Mõnikord on see väga mugav, pole vaja seadet lahti võtta ja trimmi keerata. Tavaliselt kasutatakse neid vooluringides ADC helitugevuse, etalonpinge, võimenduse, LCD-ekraani kontrasti, ekvalaiserite ja paljudes muudes kohtades. Digitaalsed potentsiomeetrid suudavad enamikul juhtudel üsna hästi asendada nende mehaanilisi vastaseid. Et piin uurida lahedaid detaile, soetati. Seda arutatakse.
Seadme peamised omadused:
- Takistus - 10 kOhm
- Pintsli vastupidavus - 52 oomi
- Toitepinge vahemikus 2,7 V kuni 5,5 V
- Harja positsioonide arv - 256
- Temperatuurivahemik -40 ... + 85 ° C
- Liides - SPI
Need omadused on esitatud. Tegelikult oli minu potentsiomeetri takistus 8,7 kOhm. Kuid see arv sobib andmelehel toodud maksimaalsete väärtustega, nii et pole vaja muretseda. Muide, seal on veel kaks täpselt sama potentsiomeetrit, kuid vastupanu 50 kOhm ja 100 kOhm. Samuti on sarnaste omadustega kahekordseid potentsiomeetreid. Selle potentsiomeetri harja asendit ei mäleta ja kui selleks on vajadus, tuleb seda rakendada programmiliselt. Pärast jõu rakendamist tõuseb harja alati keskmisesse asendisse.
Potentsiomeetri juhtimine
Seda seadet juhitakse kergelt kärbitud SPI kaudu. MISO rida pole, sest potentsiomeetrist ei saa midagi lugeda, saab ainult kirjutada. Potentsiomeetriga töötamise algoritmi on lihtne häbistada:
1) Määrake CS madal loogikatase
2) Saatke soovitud käsk
3) saatke andmebaidi
4) Seadke CS kõrge loogika tase
Mõelge käsu baiti üksikasjalikumalt:

Bite C1 ja C0 kasutatakse käivitatava käsu valimiseks. Neid on ainult kaks, kui mitte arvestada NOP-i. Miks ma vajan tühja käsku, ma ei saa ikkagi andmelehest aru.

P1 ja P0 valivad potentsiomeetri, millel käsku täidetakse. Sest Kuna minu potentsiomeeter pole kahekordne, on P1 bit minu jaoks täiesti kasutu.

Juhtimistarkvara silumine toimus minu uues. See oli tema esimene tuleristimine. :-) Ühendasin potentsiomeetri kontrolleriga järgmiselt:
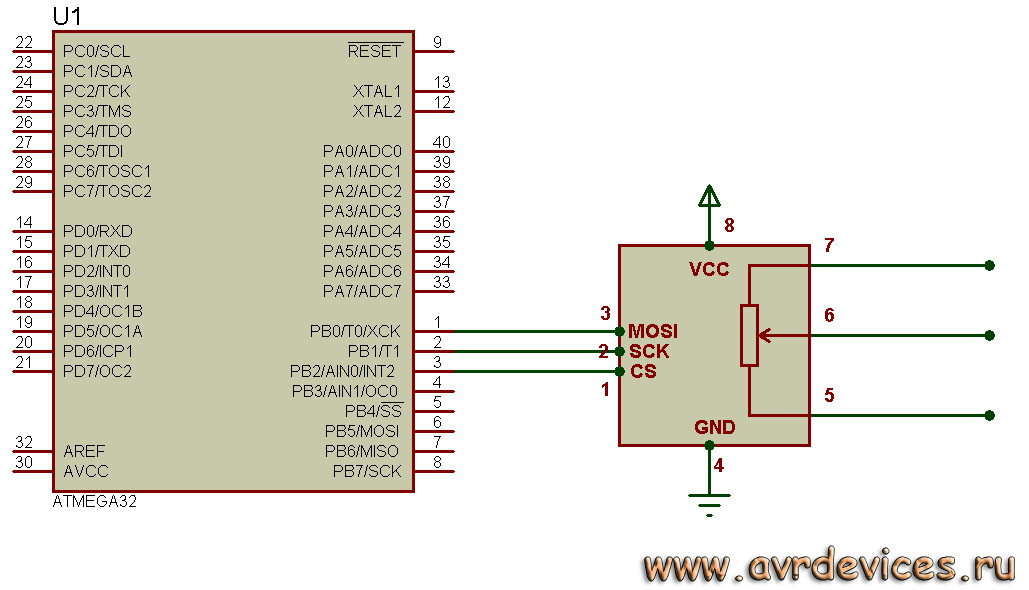
Potentsiomeetri seitsmenda ja kuuenda väljundi vahel on ühendatud multimeeter, mis näitab takistuse muutust. Samuti on kaks nuppu, mis teevad järeldused 4 ja 5 maapinnale (unustasin diagrammi joonistada). Pärast püsivara kontrollerisse õmblemist saate katsetada (ma filmin selliseid videoid esimest korda, nii et palun ärge palju lööge):
Kõik on lihtne. Ma armastan monteerijat \u003d) Ma tean C-d halvasti.
Kõrgetasemelistest programmeerimiskeeltest eelistan micropascali.
Head päeva. Andke mulle oma koordinaadid (e-post).
Saadan teile AVR-i jaoks kauni raamatu (vene keeles) C-le,
ja 100% töötav install CVAVR. Ja sina kuu (või isegi varem)
siis saate C-tähe (ja naeratate mineviku üle). Eriti oma šikka maketiga ...
Arenduskiirus, paljud valmis raamatukogud - see on põhjus ASMa-st lahkumiseks. ... See on mõeldud AVR, PIC jms jaoks
Ja arvuti küljest (Widows) - soovitan kiireks rakendamiseks -DELPHI.
“Kaukaasia on emade nutt,” on pühendatud esimesele Tšetšeenia sõjale aastatel 1995–1996.
(Ja mulle isiklikult on CAUCASUS kallis Põhja-Osseetias veedetud armeeaastatel 1981–1985).
Edusammudest ei säästetud mitte ainult ratas. Tänapäeval annavad traditsioonilised muutujad ja nii paljudes rakendustes häälestatavad takistid digitaalsele takistusele. Ingliskeelsetes allikates nimetatakse neid digitaalseks potentsiomeetriks, RDAC või digiPOT. Nende seadmete ulatus on palju laiem kui helisignaali taseme reguleerimine. Eelkõige tulevad nad appi väga paljudel juhtudel, kui on vaja muuta tagasiside parameetreid, mida on traditsiooniliste DAC-ide abil keeruline rakendada.
Eriti efektiivne on nende kasutamine koos operatsioonivõimenditega. Nii saate hankida reguleeritavaid võimendi astmeid, mitmesuguseid muundureid, filtreid, integraatoreid, pinge- ja vooluallikaid ja palju muud. Ühesõnaga, need väga odavad ja kompaktsed seadmed võivad olla kasulikud igale elektroonika arendajale ja raadioamatöörile ...
Esialgu tahtsin kirjutada lühikese artikli, kuid teema põhjaliku uurimise tulemusel ei mahtunud materjal vaevalt kahte ossa. Täna püüan rääkida nende seadmete arhitektuurist, nende võimalustest, kasutuspiirangutest ja arengusuundadest. Kokkuvõtteks puudutan lühidalt rakendusalade teemat, kuna teises osas käsitletakse nendel põhinevate skeemide praktilise rakendamise konkreetseid näiteid. PALJU näiteid!
Isiklikult olen viimase viie aasta jooksul mitmes oma disainis edukalt kasutanud digitaalset takistust, loodan, et see artiklite sari on paljudele kasulik ja aitab teil lahendada paljusid probleeme elegantsemalt ja lihtsamalt kui täna. Elektroonikast kaugel asuvate inimeste jaoks saab see artikkel lihtsalt oma silmaringi laiendada, näidates, kuidas digitaaltehnoloogia rünnaku ajal arenevad isegi sellised lihtsad asjad nagu muutuvad takistid.
P. S. Nii selgus, et näide oli juba välja antud ja seal oli ainult üks näide, kuid seda uuriti üksikasjalikult. Ülejäänud lubatud näidete jaoks peate kirjutama kolmandiku.
Arhitektuur.
Selle seadme toimimise mõistmiseks pöördume funktsionaalskeemi poole. See kujutab digitaalse 8-bitise takistuse analoogosa.
Seadme aluseks on 255 sama reitinguga takistit ja CMOS-tehnoloogia abil valmistatud kahesuunalised elektroonilised lülitid. Digitaalne väärtus vahemikus 0–255 kirjutatakse registrisse, kust see dekoodrile edastatakse. Sõltuvalt registrisse salvestatud väärtusest käivitatakse üks klahvidest, mis ühendab keskmise väljundi W lineaarse takistuse maatriksi Rs valitud punktiga. Äärmusterminalide A ja B ühendamiseks kasutatakse veel kahte klahvi. Nende abiga saab seade minna passiivsesse režiimi.
Järeldused A ja B on muutuva takistusega äärmuslike klemmide analoogid, W on keskmine klemm, millele mootor on kinnitatud tavaliste muutuvate takistitega.

Võimalikud lülitusahelad on sarnased ka traditsiooniliste muutuvate takistustega ...
Mõelge, kuidas nõutav takistus on seatud 10-kilo oomi takisti näitel. Alustuseks arvutame iga sellise takistuse moodustamiseks vajalike koostutakistite väärtuse Rs \u003d 10000/256 \u003d 39,06 oomi. Oletame, et proovime takistust klemmide W ja B vahel reguleerida. Nullpunkti saamiseks kirjutage see väärtus juhtimisregistrisse, kuid soovitud nulli asemel saame takistuse 100 oomi. Miks? Fakt on see, et igal seadme kontaktil on oma sisemine takistus ja vaadeldaval juhul on see võrdne 50 oomiga, seetõttu pole selle potentsiomeetri abil saadav minimaalne väärtus , vaid sada oomi kontaktide W ja B takistusele. ühiku registrisse saame 50 + 50 + 39 \u003d 139 oomi.
Üldiselt saab W ja B järelduste vahelise takistuse, sõltuvalt registri D väärtusest, arvutada järgmise valemi abil:
![]()
- D - registreerige väärtus vahemikus 0 kuni 255
- Rab - nominaalne takistus
- Rw - ühe kontakti takistus

Ühendusliidesed.
Mõelge nüüd kogu seadme funktsionaalskeemile koos I2C-liidesega.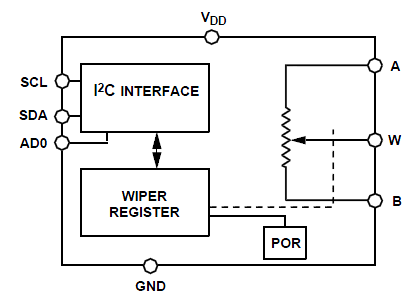
Mõningaid küsimusi võib siin põhjustada ainult AD0 väljund. See on mõeldud võimaluseks kasutada kahte I potentsiaalimõõturit samaaegselt ühes I2C kanalis. Sõltuvalt sellest, kas sellel on loogiline null või üks, muutub I2C siini seadme aadress. Järgnevalt on näidatud ühe siini kahe mikrolülituse ühendusskeem.

Lisaks I2C-liidesele kasutatakse nende seadmete juhtimiseks sageli ka SPI-liidest. Sel juhul on võimalik juhtida samas seadmes ka mitut seadet. Selleks ühendatakse need ahelas. Näiteks selline:
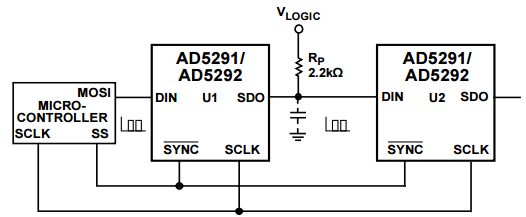
Selles režiimis töötab väärtuste kirjutamise puhverregister nihkeregistrina. Iga uus bit läheb DIN-sisendisse ja kirjutatakse SCLK-ga strobos väikseima tähendusega bitti. Samal ajal väljub kõrge järjekorraga bitti läbi SDO tihvti ja läheb keti järgmisele seadmele. Pärast teabe registreerimist kõigis seadmetes võetakse vastu SYNC-gating-impulss, mille kohaselt kirjutatakse ahela kõigi seadmete registrite uued väärtused puhverist tööregistrisse. Sellise lahenduse ilmne puudus on see, et puudub võimalus kirjutada teavet ühte seadmesse. Väärtuste mis tahes muutuste korral tuleb värskendada kogu ahela registrite sisu.
Sedalaadi probleemide lahendamiseks, aga ka lõpphinna kokkuhoidmiseks tehakse lahendusi mikroskeemide abil, mis sisaldavad korraga kahte, nelja ja isegi 6 digitaalset takistust.
Tööpinge ja vool
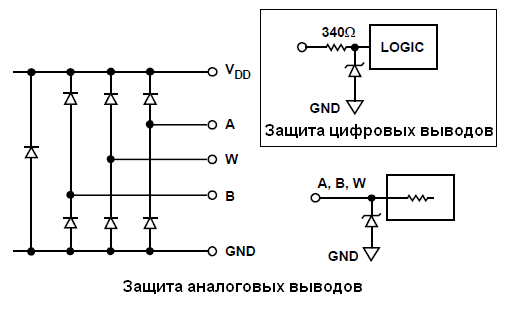
Võib-olla oli esimeste arenduste kõige olulisem puudus terminalidele lubatud piiratud pinge. See ei tohiks ületada toitepinget, mis võib jääda vahemikku 2,7–5,5 V, ja mis kõige tähtsam, ei saanud minna negatiivsesse piirkonda, mistõttu piirdus mikrolülituste kasutamine unipolaarse toitega seadmetega. Esiteks lahendasid insenerid bipolaarsuse probleemi. Nii ilmusid seadmed, mis on võimelised töötama nii unipolaarsest pingest kuni 5,5 V-ni kui ka bipolaarse energiarežiimi toetamiseks kuni ± 2,75 V. Siis hakkasid ilmuma versioonid, mille maksimaalne toiteallikas oli ± 5,5 ja isegi ± 16,5 (kuni 33 volti ühepolaarset AD5291 / 5292). Muidugi on selles parameetris traditsioonilistele takistustele palju kasu, kuid valdava enamiku vooluahelate jaoks on 33 volti täiesti piisav.Sellegipoolest, olenemata sellest, millist maksimaalset pinget seade toetab, kui on võimalik ületada lubatud piire, tuleks rakendada vähemalt lihtsamat kaitset dioodide või summutitega.
Teine tõsine probleem on digitaalsete takistuste madal maksimaalne töövool, mis on peamiselt tingitud nende väiksusest. Ilma aja jooksul lagunemise ohuta ei tohiks enamiku mudelite keskmine alalisvool ületada 3 mA. Kui voolavat voolu impulsitakse, võib selle maksimaalne väärtus olla suurem.
Võitlus täpsuse eest. Kontrollitud kaose tehnoloogia
Kahjuks võimaldab olemasolev tootmistehnoloogia digitaalsetes takistustes kasutatavate integreeritud takistite takistuse kõrvalekaldeid kuni 20 protsenti nimiväärtusest. Kuid ühe partii ja lisaks ühe konkreetse seadme piires ei ületa takistuse erinevus 0,1%. Paigaldamise täpsuse suurendamiseks hakkas tootja mõõtma takistite takistust vähemalt igal plaadil ja kirjutama iga mikrolülituse püsivasse mällu mitte nominaalne, vaid tegelik takistus, mis saadi tootmise käigus, täpsusega 0,01 protsenti. Selline mehhanism võimaldab eriti AD5229 / 5235 mikroskeemidel arvutada takistuse seadistuse tegeliku täpsuse veaga, mis pole isegi mitme pöörde häälestamise takistide korral saavutatav - 0,01 protsenti. Selle põhjal saab reguleerida digitaalse koodi takistuseks dekodeerimise toimingut. Oletame, et elementaartakistus on 100 oomi. Seejärel seadistate takistuse väärtuseks 1K digitaalses registris 10. Kui aga reaalses seadmes erineb takistus nimiväärtusest ülespoole ja on võrdne 110 oomiga, siis tasemel 10 saate 1,1K. Arvestades takistuse tegelikku väärtust, saab mikrokontroller koodi siiski ümber arvutada ja reaalselt anda kümne asemel koodi 9. Siis saame tegelikkuses 9 * 110 \u003d 990 oomi.Lisaks on AD patenteerinud takistuse kalibreerimistehnoloogia täpsusega 1%. Kahjuks ei leidnud ma teavet selle töömehhanismi kohta.
Takistuse sätte diskreetsuse suurendamiseks töötati välja 10-bitise dekoodriga seadmed, mis tagavad 1024 reguleerimisetapi. Selle parameetri täiendava suurendamise saab saavutada kahe erineva reitinguga digitaalse takistuse jada- või paralleelühenduse abil.
Temperatuuri stabiilsus
See pole üldse halb. Kilega valmistatud takistite kasutamine võimaldab saavutada triivitaseme, mis ei ületa 35 ppm / ° C (0,0035%). On olemas termilise kompenseerimisega seadmeid, mille temperatuuri triiv on tasemel 10 ppm / ° C. Selles parameetris on digitaalsed takistused paljudest mootoripartneritest paremad. Rakenduste jaoks, kus see parameeter ei ole asjakohane, võite valida odavamad seadmed pooljuhttakistitega, mille triiv on temperatuuril 600 ppm / ° C.Enamiku ADI seadmete töötemperatuuride vahemik on vahemikus -40 ° C kuni + 125 ° C, mis on piisav valdava enamuse rakenduste jaoks.
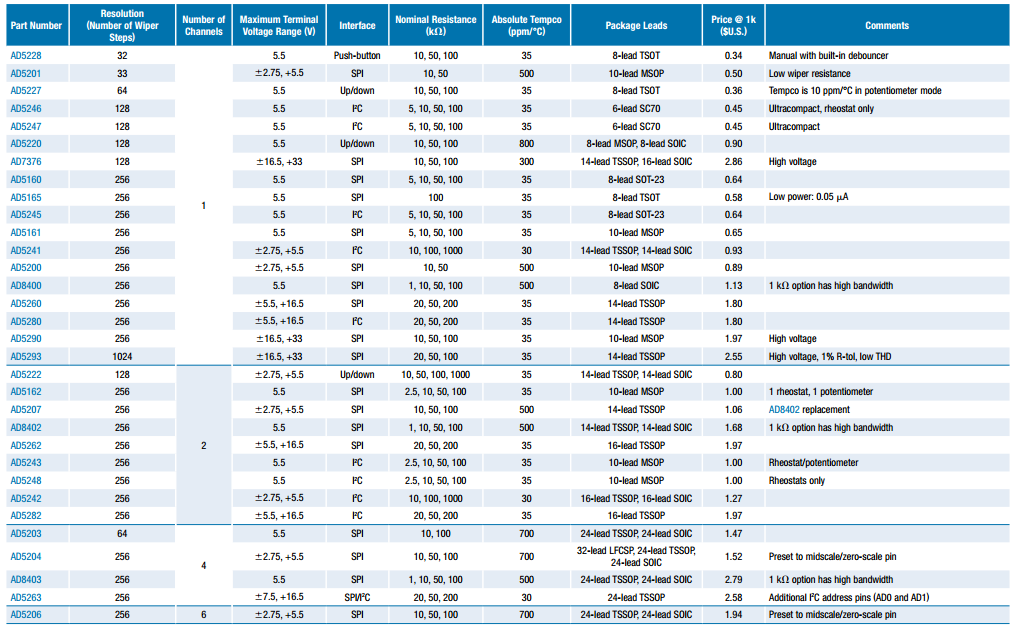
Hulk saadaolevaid takistusi.
Muidugi pole sellist mitmekesisust nagu traditsiooniliste liugtakistite puhul, kuid valida on palju. Allolev tabel illustreerib saadaolevate takistuste sõltuvust seadme bitti sügavusest.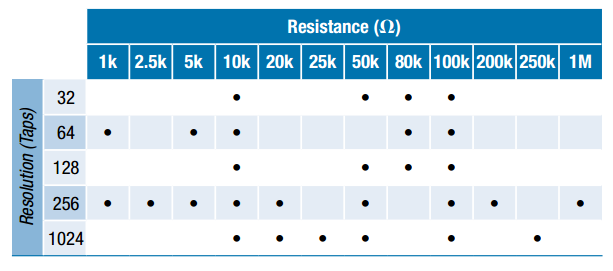
Signaali moonutamine
Digitaalsete võimendite poolt põhjustatud signaali peamised moonutused võib jagada kahte klassi.- Harmooniline moonutus ehk lääne stiilis täielik harmooniline moonutus (THD).
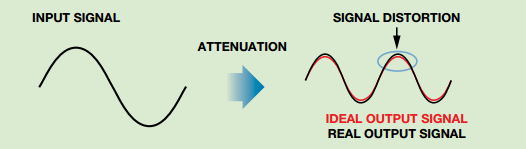
Need moonutused suurenevad rakendatud pinge suurenemisel. Nende tüüpilistest väärtustest saate ülevaate järgmisest tabelist, mis on koostatud AD9252 kiipide jaoks ...

Mõnel juhul võib seda tüüpi moonutused tõusta -60 dB-ni
Selle efekti mõju suureneb seadme vastupidavuse suurenemisega. Allolevas tabelis on näidatud, millisel sagedusel täheldatakse signaali sumbumist 3 detsibelli erineva võimsusega erinevate takistuste korral.

Suurema selguse huvides annan rohkem graafikuid signaali edastamise sõltuvusest seatud takistuse tasemest AD5291 kiipide puhul, mille eri nimiväärtused on 20 ja 100 kilo-oomi.

Seega selgub, et mida suurem on takistuse reiting, seda madalam on selle töösagedus.
Evolutsiooni "kiibid"
Tootjad proovivad teha seadmega töötamise kõige mugavamaks, leiutades mitmesuguseid meeldivaid asju. Selle tulemusel omandas digitaalne takistus sisemise muutumatu mälu, nii korra kui ka korduvalt programmeeritav.Selle peamine eesmärk on säilitada algne takistuse väärtus, mis seatakse automaatselt kohe pärast toite sisselülitamist. Esimesed elektrooniliste takistite mudelid paigaldati siis, kui toide rakendati keskmisele positsioonile, siis ilmus nullile lähtestamiseks täiendav jalg, siis sai taseme seadistada mällu salvestatud väärtust kasutades. Kõige arenenumate mudelite korral saab mällu kirjutada mitu eelhäälestatud väärtust, mille vahel saab kasutaja nuppe vajutades kiiresti ümber lülituda.

Lisaks on ilmunud liides kooderite ühendamiseks.
Mida veel parandada?
Võite ette kujutada, millises suunas digitaaltakistuste tootmine areneb.Suurema täpsuse saavutamiseks võib lülitussüsteem muutuda.
Näiteks kui lisada traditsioonilisele vooluringile ainult üks takistus paralleelselt, noh, kaks. Sümmeetria jaoks on ülemises õlas veel üks asi - takistuse seadistuse täpsust saab kahekordistada! Kahe seadme kombinatsioon ühes korpuses võimaldab mitu korda suurendada täpsust ja täpsust.

Dekooderit juhtiva kõige lihtsama mikrokontrolleri sissejuhatus võimaldab saadud takistuste tegeliku väärtuse põhjal luua lülitusprogrammi, mille abil saab seadme takistuse seada väga suure täpsusega - 0,1% ja rohkem. Temperatuuri anduri integreerimisega sellistesse seadmetesse saab sisse viia kompensatsiooni, et säilitada lineaarsus väga laias temperatuurivahemikus. Võib-olla on sagedusega kompenseeritud takistuste analoogide ilmumine HiFi seadmetele, mis on ühel juhul mitu takistust. Ühte neist kasutatakse helitugevuse reguleerimiseks ja teist sageduse kompenseerimiseks.
Kasutusalad
Esitan artikli järgmises osas konkreetsed vooluringi lahendused, mis põhinevad digitaalsel takistusel, praegu kaalume vaid rakendusalasid.Muidugi tulevad kõigepealt meelde reguleeritava võimendusega võimendid.
Väärtuste seadistamise täpsuse suurendamise tulemusel sai instrumentaalvõimendite võimenduseks kasutada juhtimisahelates elektroonilisi takistusi.

Vedelkristallekraani kontrastsuse automaatse või tarkvara muutmise saab korraldada elektroonilise takistusega 10 kilo-oomi.

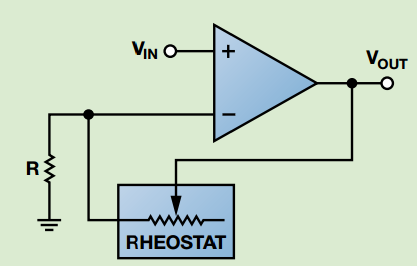
Digitaalse takistuse põhjal on hõlpsasti juhitavaid filtreid rakendada. Suure järjekorraga filtrid vajavad sageli mitut sama reitinguga põhitakistit. Seda on väga mugav kasutada instrumentidega, mis sisaldavad ühes korpuses mitu takistust, kuna sel juhul on meil suurepärane korratavus. Joonisel on kujutatud lihtsaima juhitava madalpääsfiltri lihtsustatud diagramm.

Logaritmiline võimendi, suhteliselt kõrge toitepingega, põhineb AD5292.

Tarkvara abil juhitav pingeregulaator.

ADI rivistus
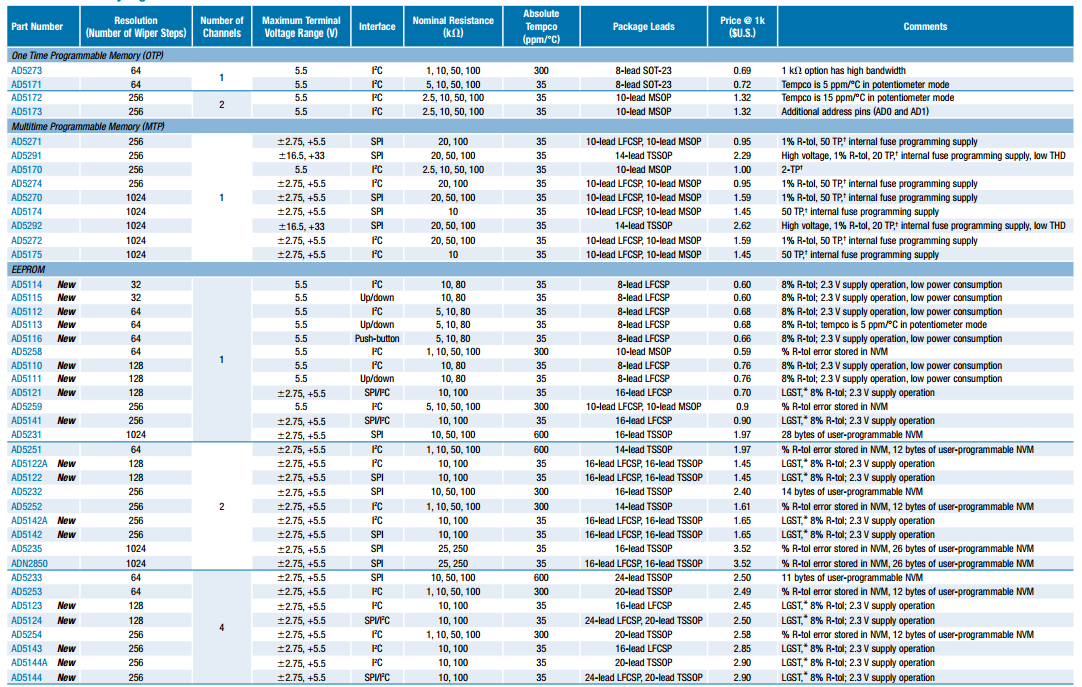
Kokkuvõtteks annan täieliku loetelu tänapäeval saadaval olevatest analoogseadmete elektroonilistest potentsiomeetritest. Tuleb märkida, et mitte ainult see ettevõte ei tooda selliseid seadmeid. Näiteks teeb MAXIM ka pikka aega häid žetoone.Alustuseks seadmed, mis ei toeta kasutaja programmeerimist.
Kokkuvõtteks programmeeritavad seadmed. Konkreetse mudeli valimisel tasub pöörata tähelepanu asjaolule, et need on mõlemad kord programmeeritavad ja toetavad ümberprogrammeerimist. Pealegi pakuvad paljud tsüklid ainult EEPROM-tehnoloogia abil loodud mikrolülitusi.
See lõpetab ülevaate. Järgmine artikkel on pühendatud digitaalseid takistusi kasutavate praktiliste vooluringide kaalumisele.
P.S. Nii juhtus, et juba lahkus
Erinevate koormuse all olevate vooluahelate testimiseks vajab amatöörraadio sageli suurt erineva võimsusega takistite ja vastavalt erinevate võimsustega takistusi. Tülikast testitakistuste komplektist vabanemine aitab teid elektrooniline takistiSelle skeem on esitatud allpool.
Eriti aitab see skeem konfigureerida toiteallikas: saate teada, millise koormuse korral pulsatsioon kasvab, väljundpinge väärtus muutub, see aitab teil seadistada elektroonilist kaitset ülekoormuse eest jne.
Koormuse ekvivalentvooluring väga lihtne. Ahela põhielement on MOSFET-N transistor. Voolutarbimist reguleeritakse potentsiomeetri R2 abil väravas oleva pinge muutmisega. MOSFETi takistus muutub sõltuvalt värava pingest. Pinge potentsiomeetri sisendis on stabiilne tänu zeneri dioodile VD1.
Lihtne koormuse ekvivalentvooluring


Väikese väljundpinge allika testimiseks peate kasutama loogikat MOSFET (MOSFET on mõeldud loogikatasemelt ümberlülitumiseks). Sellel on madalam lävipinge ja see võimaldab teil kontrollida toiteallikaid, mille pinge on kuni 4 V. Loogiliste transistoride jaoks sobib 5 V zeneri diood, klassikalistele MOSFETidele - 9 V. MOSFET tuleks panna suur radiaator . TO220 paketi transistori lühiajaline koormus võib ulatuda 100 vatti. Pidevalt võib see töötada suure radiaatori korral kuni 50 vatti koormusega. See töötab sisendpinge vahemikus 4-25 V. Loogiliste transistoride maksimaalne pinge DS-klemmide vahel on reeglina 30 V.
Muudetav digitaalselt juhitav takisti. See seade täidab sama elektroonilise reguleerimise funktsiooni kui mehaaniline potentsiomeeter või muutuvtakisti. Takistus muutub diskreetselt, kui loendussisendile CLK rakendatakse impulssimpulssi, määratakse loendamise suund (takistuse suurenemine või vähenemine) signaali tasemega ÜLES / ALLA sisendis.
Saadaval on 128 diskreetset takistusväärtust, potentsiomeetrite nimiväärtus 10, 50 ja 100 kOhm.
Sisse joonis 1 Kuvatakse digitaalse potentsiomeetri funktsionaalskeem. Nimiväärtusega 10 kOhm on klemmide A ja B vaheline takistus konstantne ja ulatub 10 kOhm ning takistuse juurdekasvu juurdekasv on võrdne:
R SAMM - 10 kOhm / 128 - 78 oomi.
Tüüpiline toitepinge 5 V, voolutarve mitte üle 40 μA.
Pingi määramine on näidatud joonis 2.
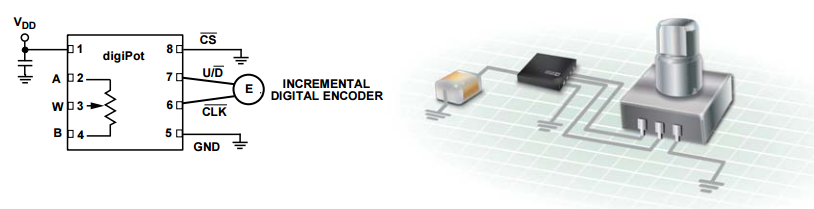
Sisse joonis 3 Näidatud on digitaalse potentsiomeetri AD5220 tüüpiline ühendusskeem.

Joon. 4. Vooluringi liides ümmarguse anduriga
Sisse joonis 4 Näidatud on digitaalse potentsiomeetri AD5220 kasutamist liideskontuuris koos ümmarguse mootori võlli positsioonianduriga RE11CTV1Y12-EF2CS. Skeemi töötas välja P. Kairolomuk (USA, California). Pöördkooder teisendab võlli nurgaasendi koodiks, mis saadetakse kvadratuurdekodeerijale (LS7084 - 90 ° faasinihedekooder). Dekooder genereerib digitaalse potentsiomeetri jaoks CLK ja U / D juhtsignaale.
Signaalid A ja B ( joonis 5) ümmargune kooder läbib kvadratuurdekoodri, mis teisendab signaalide A ja B faasierinevuse juhtsignaalideks CLK ja U / D AD5220 jaoks. Kui signaal B on signaalist A ees (mootori võll pöörleb päripäeva), rakendatakse digitaalsele potentsiomeetrile kõrge U / D tase. Kui signaal A on signaalist B ees (mootori võll pöörleb vastupäeva), rakendatakse digitaalsele potentsiomeetrile madalat U / D taset. Kvadratuurdekooder genereerib üheaegselt sünkroonse taktsignaali AD5220 jaoks. Kellimpulsi laiuse lineaarne muutus toimub RBIASi reguleerimisega.
Lisaks kvadratuurisignaalide dekodeerimisele nurgaasend ja kella genereerimisel pakub LS7084 ka müra, vibratsiooni ja muude mööduvate efektide filtreerimist. See funktsioon on seda tüüpi seadme jaoks oluline. Erinevalt optilistest kooderitest on RE11CT-V1Y12-EF2CS odav elektriline ümmargune kooder, milles võlli mis tahes pöörlemine võib põhjustada tugeva löögi või müra lõhkemise, mis on tingitud lüliti metallkontaktide ebatäiuslikust olemusest. LS7084 hoiab ära selliste häirete edastamise digitaalpotentsiomeetrile AD5220.
Seadme tööpõhimõte on väga lihtne. Kui mootori võll pöörleb päripäeva, suureneb takistus klemmide B1 ja RWB1 vahel, kuni digitaalse potentsiomeetri muutuva takistuse väärtus saavutab maksimaalse väärtuse. Võlli edasine pöörlemine samas suunas ei mõjuta väljundtakistust.
Sarnaselt, kui võll pöörleb vastupäeva, väheneb klemmide B1 ja RWB1 vaheline takistus, kuni takistus jõuab nullini, ja võlli edasisel pöörlemisel samas suunas pole mingit mõju.
Kirjandus.
1. Peter Khairolomour, analoogseadmed, San Jose, CA, 6. märts 2003
2. Raadioskeem, nr 4/2011 lipen-sirp
Järgmiste proovidena sain partii digitaalseid potentsiomeetreid Analoogseadmed. Asi on huvitav ja paljutõotav. Proovin välja mõelda AD8400 / AD8402 / AD8403 rea. Need erinevad üksteisest ainult potentsiomeetrite arvu poolest ühes kiibis: vastavalt 1, 2 ja 4. Ma sain AD8402, s.t. koos kahe R-ga ühes kiibis. Voodiagrammi näete andmelehes - kõik on seal lihtne. Aga otseselt muutuva takisti rakendamine
ei ole näidatud. Ma täidan selle lünga Internetist pärit diagrammiga:
Nagu jooniselt näha, on takistuslik element Rh - Rl koosneb N-1 takistitest ja N (see on selle maht) lülitusklahvide moodustamiseks MOS-transistoride kujul. Minu puhul - N \u003d 256 ja nüüdsest mõtlen seda
. Dekoodri kood määratleb vooluringiga ühendatud “liuguri” Rw vastava MOS-transistori kaudu 255 seeriaga ühendatud takisti ühenduspunkti. Kui potentsiomeetri sõltuvus on lineaarne (nagu minu puhul), siis on joont moodustavate takistite takistusväärtused samad. Panen tähele, et vasakpoolsel joonisel olevad sümbolid vastavad andmelehel olevatele sümbolitele: Rh -\u003e A, Rl -\u003e B ja Rw -\u003e W.
Paigalduskäsud võetakse vastu 10-bitise SPI-liidese kaudu.
Järgmisena vaadake kivi pilu.
Joonis andmelehelt:
AGND - analoog "maa";
A2-B2 - 2. takisti takistuselement;
W2 - 2. takisti liugur;
DGND - digitaalne "maa";
SHDN - mõlema takisti liugurite riistvara paigaldamise signaal minimaalse väärtuseni;
CS - standardne "kristallivalik";
SDI - jadaandmete sisestamine;
CLK - jadaliidese taktsignaal;
RS - mõlema takisti liugurite riistvara paigaldamise signaal keskmise väärtusega;
Vdd - + toitumine;
W1 - 1. takisti liugur;
A1 - B1 - 1. takisti takistuselement.
Nüüd on kontrollsõna struktuur samalt andmelehelt:
Sõna koosneb 10 numbrist. A1 ja A0 määrake, millisele takistile (00 - 1 ja 01 - 2) seatud väärtuse bait saadetakse D7 - D0 liuguri W jaoks. Nagu näete, pole seal midagi keerulist.
Leivalaud
Kujundasin tahvli juurest vana silumismooduli ATtiny2313 jaoks.  Ja kirjutas koodi:
Ja kirjutas koodi:
| # kaasata |
Nüüd tagasi vooskeemi juurde. Vaadake teda uuesti tähelepanelikult ... Kas see ei meenuta midagi? Rakendame takistuselemendi ühele väljundile kontrollpinge ja saame ... DAC - digitaal-analoog muundur! Ja selle funktsiooni jaoks on kirjutatud kood - parem oleks jälgida kiibi toimimist ostsilloskoobiga. Noh, kui soovite kontrollida ohmmeetriga, siis tühistage viivitus. Siis näete vastupanu muutust.
Ja lõpuks uurimine ise.
Pärast veendumist, et digitaalne potentsiomeeter töötab ohmmeetriga, samuti SHDN- ja RS-signaalide korrektses töös, kommenteerisin eelpool mainitud poole sekundi viivitust ja otsustasin enda jaoks teada saada kiibi käitumise, kui:
1. Takisti pingeallikas otse kiibi enda toiteallikast, s.t. mitte galvaaniliselt sidumata. Pilt osutus selliseks.

