디지털 포텐쇼미터는 가변 저항기브러시 위치는 마이크로 컨트롤러를 사용하여 프로그래밍 방식으로 설정할 수 있습니다. 때로는 매우 편리합니다. 장치를 분해하고 트리머를 비틀 필요가 없습니다. 일반적으로 이들은 볼륨, ADC의 기준 전압, 게인, LCD 디스플레이의 대비, 이퀄라이저 등을 조정하는 회로에 사용됩니다. 대부분의 경우 디지털 전위차계는 기계적 대응 물을 대체 할 수 있습니다. 멋진 디테일을 연구하기 위해 고문을 받기 위해 인수되었습니다. 논의 될 것이다.
장치의 주요 특징 :
- 임피던스-10kOhm
- 브러쉬 저항-52 Ohms
- 2.7V ~ 5.5V의 공급 전압
- 브러시 위치 수-256
- 온도 범위 -40 ... + 85 ° C
- 인터페이스-SPI
이러한 특성은 다음과 같습니다. 실제로 내 전위차계의 임피던스는 8.7kOhm입니다. 그러나이 수치는 데이터 시트에 제공된 최대 값에 맞으므로 걱정할 필요가 없습니다. 그런데 50 kOhm과 100 kOhm의 저항을 가진 정확히 동일한 전위차계가 두 개 더 있습니다. 비슷한 특성을 가진 이중 전위차계도 있습니다. 이 전위차계의 브러시 위치는 기억되지 않으며, 필요한 경우 프로그래밍 방식으로 구현해야합니다. 전원을 켠 후 브러시는 항상 중간 위치에서 상승합니다.
전위차계 제어
이 장치는 약간 잘린 SPI를 통해 제어됩니다. MISO 라인이 없습니다. 전위차계에서 아무것도 읽을 수 없으며 쓸 수만 있습니다. 전위차계를 사용하는 알고리즘은 치명적입니다.
1) CS 로우 로직 레벨 설정
2) 원하는 명령을 보냅니다
3) 데이터 바이트 전송
4) CS 하이 로직 레벨 설정
명령 바이트를 더 자세히 고려하십시오.

비트 C1 및 C0은 실행 가능 명령을 선택하는 데 사용됩니다. NOP를 세지 않고 두 개만 있습니다. 빈 명령이 필요한 이유는 여전히 데이터 시트에서 이해할 수 없습니다.

P1 및 P0은 명령이 실행될 전위차계를 선택합니다. 때문에 내 전위차계는 듀얼이 아니기 때문에 P1 비트는 완전히 쓸모가 없습니다.

새로운 제어 소프트웨어 디버깅이 발생했습니다. 이것이 그녀의 첫 번째 침례였습니다. :-) 다음과 같이 전위차계를 컨트롤러에 연결했습니다.
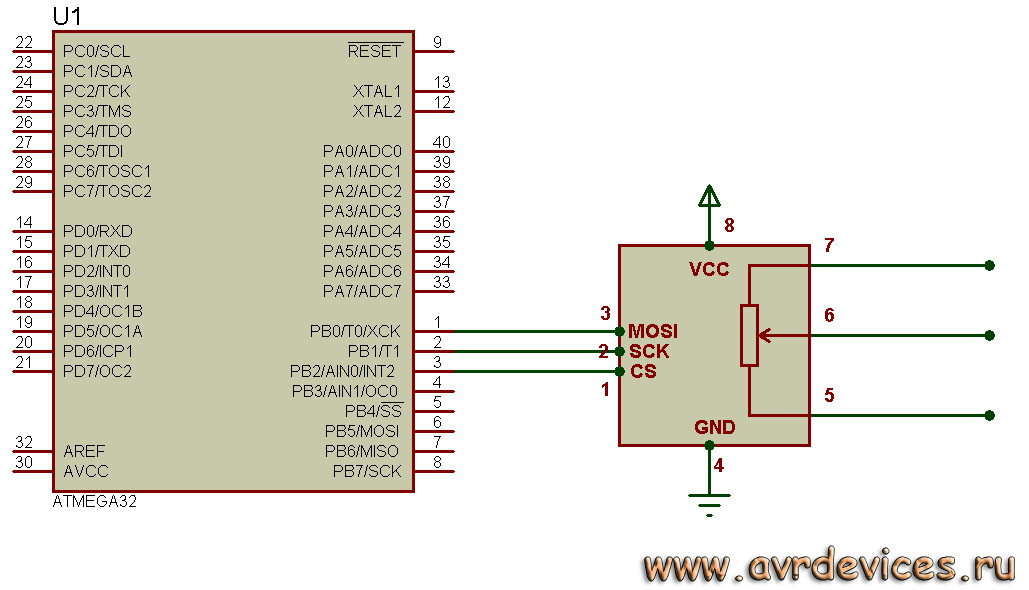
전위차계의 7 번째와 6 번째 출력 사이에는 저항의 변화를 보여주는 멀티 미터가 연결됩니다. 결론 4와 5를지면으로 만드는 두 개의 버튼도 있습니다 (다이어그램에서 그리는 것을 잊었습니다). 펌웨어를 컨트롤러에 꿰매어 실험 해 볼 수 있습니다 (처음으로 이러한 비디오를 촬영하고 있으므로 많이 걷지 마십시오).
모든 것이 간단합니다. 나는 어셈블러를 좋아한다 \u003d) 나는 C를 잘못 알고있다.
고급 프로그래밍 언어 중에서 마이크로 파스칼을 선호합니다.
좋은 날. 당신의 좌표를 알려주십시오 (이메일).
AVR을 위해 C에 관한 아름다운 책 (러시아어)을 보내겠습니다.
100 % 작동 CVAVR 설치. 그리고 당신은 한 달에 (또는 더 일찍)
당신은 C에 흥얼 거리며 (과거에 대해 웃으며). 특히 세련된 모형과 함께 ...
개발 속도, 많은 기성품 라이브러리 – 이것이 ASMa를 떠나는 이유입니다. ... AVR, PIC 등을위한 것입니다.
그리고 컴퓨터 측면에서 (Widows)-빠른 구현을 위해 -DELPHI를 권장합니다.
“코카서스는 어머니의 외침입니다.”는 1995-1996 년의 첫 체첸 전쟁에 전념하고 있습니다.
(개인적으로 나에게, CAUCASUS는 노스 오세티아 1981-1985에서 소비 한 군대 년에 비싸다).
자전거뿐만 아니라 발전도 아끼지 않습니다. 오늘날 많은 응용 분야에서 기존의 변수 및 튜닝 저항은 디지털 저항을 제공합니다. 영어 소스에서는 디지털 포텐쇼미터, RDAC 또는 digiPOT이라고합니다. 이 장치의 범위는 사운드 신호 레벨을 조정하는 것보다 훨씬 넓습니다. 특히 피드백 매개 변수를 변경해야하는 경우에는 기존 DAC를 사용하여 구현하기가 어려운 경우가 많습니다.
연산 증폭기와 함께 사용하는 것이 특히 효과적입니다. 따라서 조정 가능한 증폭 단계, 다양한 종류의 변환기, 필터, 적분기, 전압 및 전류 소스 등을 얻을 수 있습니다. 한마디로,이 매우 저렴한 소형 장치는 모든 전자 개발자와 라디오 아마추어에게 유용 할 수 있습니다 ...
처음에는 짧은 기사를 쓰고 싶었지만 주제에 대한 심층적 인 연구 결과 자료는 두 부분으로 잘 맞지 않습니다. 오늘은 이러한 장치의 아키텍처, 기능, 사용 제한 및 개발 동향에 대해 이야기하려고합니다. 결론적으로, 나는 응용 분야의 주제에 대해 간략하게 살펴볼 것입니다. 그에 기반한 체계의 실제 구현에 대한 구체적인 예가 두 번째 부분에서 고려되기 때문입니다. 많은 예!
개인적으로 지난 5 년 동안 여러 개발 과정에서 디지털 저항을 성공적으로 사용했습니다.이 시리즈의 기사가 많은 사람들에게 유용하고 오늘날보다 더 우아하고 간단하게 많은 문제를 해결하는 데 도움이되기를 바랍니다. 전자 기사에서 멀리 떨어진 사람들에게이 기사는 디지털 기술의 맹공으로 가변 저항과 같은 단순한 것들이 어떻게 진화하는지 보여줌으로써 단순히 시야를 넓힐 수 있습니다.
추신 : 예제가 이미 발행되었고 하나의 예제 만 있지만 세부적으로 분석 된 것으로 나타났습니다. 약속 된 나머지 예에서는 세 번째를 써야합니다.
건축물.
이 장치의 작동 방식을 이해하기 위해 기능 다이어그램으로 이동합니다. 디지털 8 비트 저항의 아날로그 부분을 나타냅니다.
이 장치의 기본은 CMOS 기술을 사용하여 동일한 정격의 255 개의 저항과 양방향 전자 스위치입니다. 0-255 범위의 디지털 값은 디코더에 공급되는 레지스터에 기록됩니다. 레지스터에 저장된 값에 따라 키 중 하나가 트리거되어 평균 출력 W를 선형 저항 매트릭스 Rs의 선택된 지점에 연결합니다. 극단적 인 결론 A와 B를 연결하는 데 두 개의 키가 더 사용됩니다. 도움을 받으면 장치가 비활성 모드로 전환 될 수 있습니다.
결론 A와 B는 가변 저항의 극단 단자와 유사하며, W는 엔진이 일반 가변 저항에 연결된 중간 단자입니다.

가능한 스위칭 방식은 기존의 가변 저항과 유사합니다 ...
10 킬로 옴 저항의 예에서 필요한 저항을 설정하는 방법을 고려하십시오. 우선, 우리는 그러한 저항 Rs \u003d 10000/256 \u003d 39.06 Ohm의 형성에 필요한 각 어셈블리 저항의 값을 계산합니다. 단자 W와 B 사이의 저항을 조정하려고한다고 가정합니다. 0을 얻으려면이 값을 제어 레지스터에 쓰십시오. 그러나 원하는 0 대신 100ohm의 저항을 얻습니다. 왜? 사실 장치의 각 접점에는 자체 내부 저항이 있으며 고려중인 경우 50 Ohms와 같으 므로이 전위차계를 사용하여 얻을 수있는 최소값은 0이 아니라 접점 W 및 B의 저항에 100 Ohms입니다. 단위 레지스터 우리는 50 + 50 + 39 \u003d 139 Ohms를 얻습니다.
일반적인 경우 단자 W와 B 사이의 저항은 다음 공식으로 레지스터 D의 값에 따라 계산할 수 있습니다.
![]()
- D-0에서 255까지의 레지스터 값
- 랩-공칭 저항
- Rw-하나의 접점 저항

연결 인터페이스.
이제 I2C 인터페이스가있는 전체 장치의 기능 다이어그램을 고려하십시오.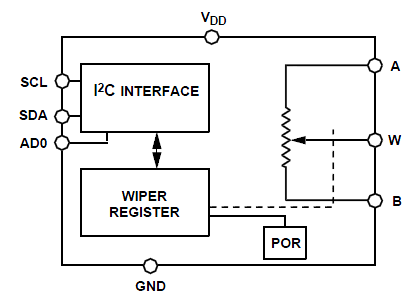
여기서는 AD0 출력 만 일부 질문을 야기 할 수 있습니다. 하나의 I2C 채널에서 두 개의 전위차계를 동시에 사용할 수 있도록 설계되었습니다. 논리 0이 있는지 여부에 따라 I2C 버스의 장치 주소가 변경됩니다. 하나의 버스에있는 두 칩의 연결 다이어그램은 다음과 같습니다.

I2C 인터페이스 외에도 SPI 인터페이스는 종종 이러한 장치를 제어하는 \u200b\u200b데 사용됩니다. 이 경우 동일한 버스에서 여러 장치를 제어 할 수도 있습니다. 이를 위해 체인으로 결합됩니다. 예를 들면 다음과 같습니다.
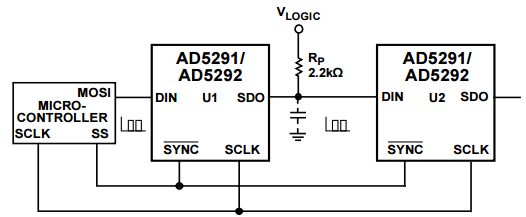
이 모드에서 값 쓰기의 버퍼 레지스터는 시프트 레지스터로 작동합니다. 각각의 새 비트는 DIN 입력으로 이동하고 SCLK를 사용하여 스트로브에서 최하위 비트에 기록됩니다. 동시에, 상위 비트는 SDO 핀을 통해 나가고 체인의 다음 장치로갑니다. 정보가 모든 장치에 기록 된 후 SYNC 게이팅 펄스가 수신되어 체인에있는 모든 장치의 레지스터의 새로운 값이 버퍼에서 작업 레지스터로 덮어 쓰여집니다. 이 솔루션의 명백한 단점은 단일 장치에 정보를 쓸 수있는 방법이 없다는 것입니다. 값을 변경하려면 전체 체인의 레지스터 내용을 업데이트해야합니다.
이러한 종류의 문제를 해결하고 최종 가격을 절약하기 위해 솔루션은 동시에 2, 4 및 6 개의 디지털 저항을 포함하는 미세 회로에 의해 만들어집니다.
작동 전압 및 전류
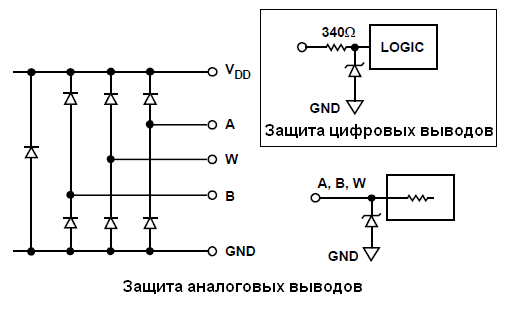
아마도 첫 번째 개발의 가장 큰 단점은 터미널에 허용 된 제한된 전압 일 것입니다. 공급 전압을 초과해서는 안되며, 이는 2.7 ~ 5.5V 범위에있을 수 있으며, 가장 중요한 것은 음의 영역으로 갈 수 없기 때문에 마이크로 회로의 사용은 단극 전력을 갖는 장치로 제한되었습니다. 우선, 엔지니어는 양극성 문제를 해결했습니다. 따라서 최대 5.5V의 단극 전압에서 작동하고 최대 ± 2.75V의 양극 공급 모드를 지원할 수있는 장치가있었습니다. 그런 다음 최대 전원 공급 장치가 ± 5.5, 심지어 ± 16.5 인 버전이 나타나기 시작했습니다 (AD5291 / 5292에서 최대 33V의 단 극성). 물론 기존 저항은이 매개 변수에서 여전히 큰 이점을 제공하지만 대부분의 회로에는 33V로 충분합니다.그럼에도 불구하고 장치에서 지원하는 최대 전압에 관계없이 허용되는 한계를 초과 할 수있는 경우 다이오드 또는 서프 레서를 사용하여 최소한 가장 간단한 보호를 적용해야합니다.
또 다른 심각한 문제는 디지털 저항의 최대 작동 전류가 낮다는 것인데, 이는 주로 크기가 작기 때문입니다. 시간이 지남에 따라 저하 될 위험이 없으면 대부분의 모델의 평균 직류는 3mA를 초과해서는 안됩니다. 흐르는 전류가 펄스되면 최대 값이 더 높아질 수 있습니다.
정확성을위한 투쟁. 통제 된 혼돈 기술
불행하게도, 기존 제조 기술은 디지털 저항에 사용되는 통합 저항의 저항 편차를 공칭 값의 최대 20 %까지 허용합니다. 그러나, 하나의 배치, 특히 하나의 특정 장치 내에서, 저항 차이는 0.1 %를 초과하지 않는다. 설치의 정확성을 높이기 위해 제조업체는 적어도 각 플레이트에서 저항의 저항을 측정하고 공칭이 아니라 생산 중에 얻은 실제 저항을 0.01 %의 정확도로 각 미세 회로의 비 휘발성 메모리에 기록하기 시작했습니다. 이러한 메커니즘을 통해 특히 AD5229 / 5235 마이크로 칩에서 멀티 턴 트리밍 저항 (0.01 %)에서도 달성 할 수없는 오류로 저항 설정의 실제 정확도를 계산할 수 있습니다. 이에 기초하여, 디지털 코드를 저항으로 디코딩하는 동작이 조정될 수있다. 기본 저항이 100 옴이라고 가정하십시오. 그런 다음 저항을 1K로 설정하려면 디지털 레지스터에서 저항을 10으로 설정하지만 실제 장치에서 저항이 위의 값에서 벗어나 110 Ohms와 같으면 레벨 10에서 1.1K가됩니다. 그러나 저항의 실제 값을 고려한 마이크로 컨트롤러는 코드를 다시 계산하고 실제로 10 대신 코드 9를 디코더로 보낼 수 있습니다. 그러면 실제로 9 * 110 \u003d 990 Ohms가됩니다.또한 AD는 1 %의 정확도로 특허를받은 저항 교정 기술을 보유하고 있습니다. 불행히도 나는 그 작동 메커니즘이 무엇인지 정보를 찾을 수 없었습니다.
저항 설치의 불연속성을 높이기 위해 1024 개의 조정 단계를 제공하는 10 비트 디코더가있는 장치가 개발되었습니다. 등급이 다른 두 개의 디지털 저항을 직렬 또는 병렬로 연결하면이 파라미터를 추가로 증가시킬 수 있습니다.
온도 안정성
전혀 나쁘지 않습니다. 필름으로 만든 저항을 사용하면 35ppm / ° C (0.0035 %)를 초과하지 않는 드리프트 레벨을 달성 할 수 있습니다. 열 보상 기능이있는 장치가 있으며 온도 드리프트는 10ppm / ° C 수준입니다. 이 파라미터에서, 디지털 저항은 많은 엔진 대응 물보다 우수합니다. 이 매개 변수가 관련이없는 응용 분야의 경우 드리프트가 600ppm / ° C 인 반도체 저항기가있는 저렴한 장치를 선택할 수 있습니다.ADI에서 대부분의 장치의 작동 온도 범위는 -40 ° C ~ + 125 ° C 범위이며 대부분의 응용 분야에 충분합니다.
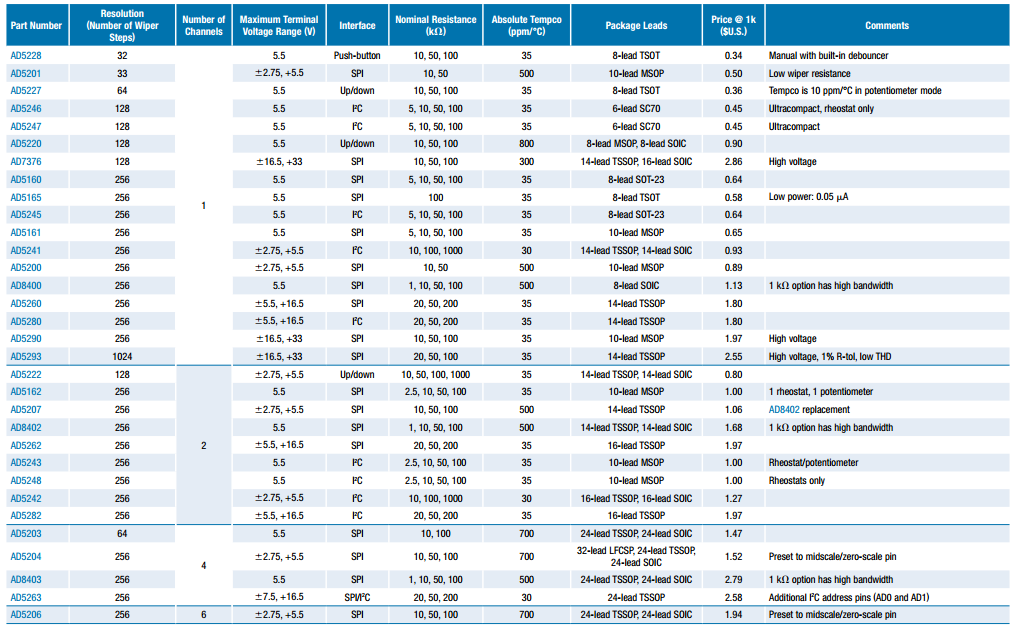
사용 가능한 여러 저항.
물론 기존의 슬라이드 저항과 같은 다양성은 없지만 선택할 수있는 것이 많습니다. 아래 표는 장치의 비트 깊이에 대한 사용 가능한 저항의 의존성을 보여줍니다.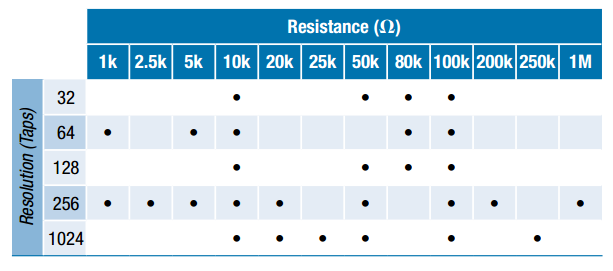
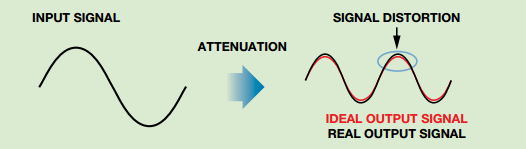
신호 왜곡
디지털 증폭기에 의해 도입 된 신호의 주요 왜곡은 두 가지 등급으로 나눌 수 있습니다.- 고조파 왜곡 또는 웨스턴 스타일 총 고조파 왜곡 (THD).
이러한 왜곡은인가 전압이 증가함에 따라 증가합니다. AD9252 용으로 컴파일 된 다음 표에서 일반적인 값에 대한 아이디어를 얻을 수 있습니다 ...

경우에 따라이 유형의 왜곡은 -60dB로 증가 할 수 있습니다
이 효과의 효과는 장치의 저항이 증가함에 따라 증가합니다. 아래 표는 서로 다른 정격의 저항에 대해 3 데시벨의 신호 감쇠가 관찰되는 주파수를 보여줍니다.

명확성을 높이기 위해 20 및 100 킬로 옴의 정격이 다른 AD5291 칩의 설정된 저항 레벨에 대한 신호 전송 의존성에 대한 더 많은 그래프를 제공합니다.

따라서 저항 등급이 높을수록 작동 주파수가 낮아집니다.
진화의 "칩"
제조업체는 다양한 유쾌한 것들을 발명하여 장치 작업을 가장 편안하게하려고합니다. 결과적으로, 디지털 저항은 내부 및 비 휘발성 메모리를 한 번만 그리고 반복적으로 프로그래밍 할 수있었습니다.주요 목적은 초기 저항 값을 저장하는 것입니다. 초기 저항 값은 전원을 켠 직후에 자동으로 설정됩니다. 전자 저항의 첫 번째 모델은 전원이 중간 위치에 공급되었을 때 설치되었으며, 0으로 재설정하기 위해 추가 발이 나타 났으며 메모리에 기록 된 값을 사용하여 레벨을 설정할 수있었습니다. 가장 고급 모델에서는 몇 가지 사전 설정 값을 메모리에 쓸 수 있으며, 그 사이에 사용자가 버튼을 눌러 빠르게 전환 할 수 있습니다.

또한 인코더 연결을위한 인터페이스가 등장했습니다.
무엇을 개선해야합니까?
디지털 저항 생산의 발전이 어느 방향으로 진행 될지 상상할 수 있습니다.정확도를 높이기 위해 스위칭 시스템이 변경 될 수 있습니다.
예를 들어, 기존 회로에 하나의 저항 만 병렬로 추가하면됩니다. 대칭을 위해 어깨 상단에 한 가지 더-저항 설정의 정확도를 두 배로 늘릴 수 있습니다! 하나의 하우징에 두 개의 장치를 결합하면 불연속성과 정확도를 여러 번 높일 수 있습니다.

디코더를 제어하는 \u200b\u200b가장 간단한 마이크로 컨트롤러의 경우에, 획득 된 저항의 실제 값에 기초하여, 장치의 저항을 매우 높은 정확도 (0.1 % 이상)로 설정하기위한 스위칭 프로그램을 생성 할 수있다. 이러한 장치에 온도 센서를 통합하면 매우 넓은 온도 범위에서 선형성을 유지하기 위해 보상을 도입 할 수 있습니다. 아마도 HiFi 장비에 대한 주파수 보상 저항의 아날로그가 나타날 수 있습니다.이 경우 한 번에 여러 저항이 발생합니다. 그중 하나는 볼륨 레벨을 조정하는 데 사용되고 다른 하나는 주파수 보정에 사용됩니다.
사용 분야
이 기사의 다음 부분에서 디지털 저항을 기반으로 특정 회로 솔루션을 제공하는 한편 애플리케이션을 고려해 보겠습니다.물론, 게인을 조정할 수있는 앰프가 먼저 떠 오릅니다.
설정 값의 정확도가 높아짐에 따라 인스트루먼트 앰프의 게인 레벨에 대한 제어 회로에서 전자 저항을 사용할 수있게되었습니다.

10 킬로 옴의 전자 저항을 사용하여 액정 디스플레이의 콘트라스트에서 자동 또는 프로그래밍 방식의 변화를 배열 할 수 있습니다.

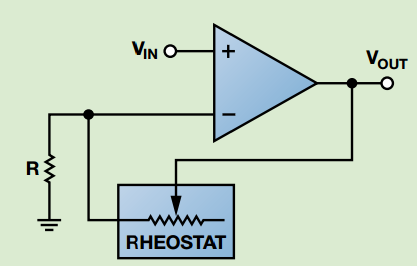
디지털 저항을 기반으로 제어 필터를 쉽게 구현할 수 있습니다. 고차 필터는 종종 동일한 정격의 여러 마스터 저항이 필요합니다. 하나의 하우징에 여러 개의 저항을 포함하는 계측기로 구현하는 것이 매우 편리합니다.이 경우 탁월한 반복성이 확보됩니다. 그림은 가장 간단한 제어 된 저역 통과 필터의 단순화 된 다이어그램을 보여줍니다.

AD5292를 기반으로 비교적 높은 공급 전압을 갖는 로그 증폭기.

소프트웨어 제어 전압 조정기.

ADI 라인업
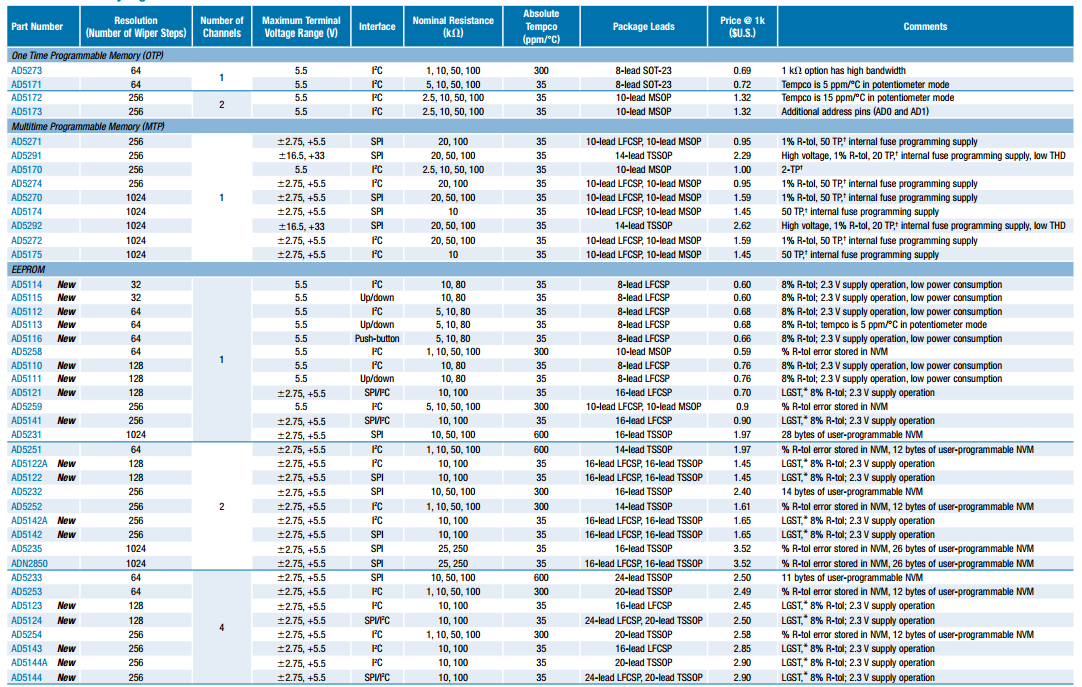
결론적으로, Analog Devices 사에서 제공하는 오늘날 전자 전위차계의 전체 목록을 제공 할 것입니다. 이 회사 만이 그러한 장치를 생산하지는 않습니다. 예를 들어, MAXIM은 오랫동안 좋은 칩을 만듭니다.우선 사용자 프로그래밍을 지원하지 않는 장치.
결론적으로 프로그래머블 디바이스. 특정 모델을 선택할 때는 한 번 프로그래밍이 가능하고 프로그래밍을 지원한다는 사실에 주목할 필요가 있습니다. 더욱이, 다수의 사이클은 EEPROM 기술에 의해 만들어진 메모리를 갖는 미세 회로만을 제공한다.
이것으로 검토를 마칩니다. 다음 기사는 디지털 저항을 사용하는 실제 회로의 고려에 대해 다룰 것입니다.
추신 이미 떠난 것은
부하 상태에서 다양한 회로를 테스트하기 위해 무선 아마추어는 종종 등급이 다르고 용량이 다른 대규모 저항 저장소가 필요합니다. 귀찮은 테스트 저항을 제거하면 도움이 될 것입니다. 전자 저항기그 계획은 아래에 나와 있습니다.
특히이 체계는 구성하는 데 도움이됩니다. 전원: 리플이 커지는 부하, 출력 전압의 값 변경, 과부하에 대한 전자 보호 설정 등을 도와줍니다.
등가 회로 매우 간단합니다. 회로의 주요 요소는 MOSFET-N 트랜지스터입니다. 전위차계 R2를 사용하여 게이트의 전압을 변경하여 전류 소비를 조절합니다. MOS 트랜지스터의 저항은 게이트의 전압에 따라 다릅니다. 전위차계의 입력 전압은 제너 다이오드 VD1 덕분에 안정적입니다.
간단한 부하 등가 회로


출력 전압이 작은 소스를 테스트하려면 로직 MOSFET을 사용해야합니다 (MOSFET은 로직 레벨에서 전환하도록 설계됨). 임계 전압이 낮고 최대 4V의 전압으로 전원 공급 장치를 확인할 수 있습니다. 로직 트랜지스터의 경우 클래식 MOSFET-9V에 5V 제너 다이오드가 적합합니다. MOSFET은 큰 라디에이터 . TO220 패키지의 트랜지스터에 대한 단기 부하는 100 와트에 도달 할 수 있습니다. 지속적으로 큰 라디에이터로 최대 50 와트의 부하로 작동 할 수 있습니다. 이것은 4-25 V의 입력 전압 범위에서 작동합니다. 로직 트랜지스터는 일반적으로 DS- 터미널 사이의 최대 전압은 30V입니다.
가변 디지털 제어 저항기. 이 장치는 기계적 전위차계 또는 가변 저항과 동일한 전자 조절 기능을 수행합니다. 클록 펄스가 카운팅 입력 CLK에 적용될 때 저항은 이산 적으로 변한다. 카운팅 방향 (저항의 증가 또는 감소)은 UP / DOWN 입력의 신호 레벨에 의해 결정된다.
128 개의 개별 저항 값, 공칭 범위의 전위차계 10, 50 및 100 kOhm을 사용할 수 있습니다.
에 그림 1 디지털 포텐쇼미터의 기능 다이어그램이 표시됩니다. 공칭 값이 10kOhm 인 경우 단자 A와 B 사이의 저항은 일정하고 10kOhm에 이르며 저항 증분의 증분은 다음과 같습니다.
R 단계-10kOhm / 128-78 옴
일반적인 공급 전압 5V, 소비 전류 40μA 이하.
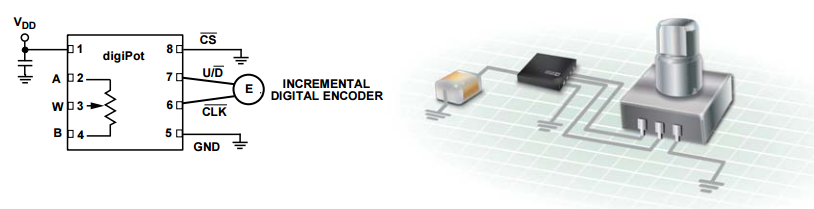
핀 할당은 그림 2.
에 그림 3 AD5220 디지털 포텐쇼미터의 일반적인 연결 다이어그램이 표시됩니다.

무화과. 4. 원형 센서와 회로 인터페이스
에 그림 4 원형 모터 샤프트 위치 센서 RE11CTV1Y12-EF2CS가있는 인터페이스 회로에서 AD5220 디지털 포텐쇼미터를 사용하는 방법이 나와 있습니다. 이 계획은 P. Kairolomuk (미국 캘리포니아)에서 개발했습니다. 로터리 엔코더는 샤프트의 각도 위치를 직교 디코더 (LS7084-90 ° 위상 편이 디코더)로 전송되는 코드로 변환합니다. 디코더는 디지털 전위차계에 대한 CLK 및 U / D 제어 신호를 생성합니다.
신호 A와 B ( 그림 5) 원형 엔코더는 신호 A와 B의 위상차를 AD5220의 제어 신호 CLK와 U / D로 변환하는 직교 디코더를 통과합니다. 신호 B가 신호 A보다 앞서 있으면 (모터 샤프트가 시계 방향으로 회전) 디지털 전위차계에 높은 U / D 레벨이 적용됩니다. 신호 A가 신호 B보다 앞서 있으면 (모터 샤프트가 시계 반대 방향으로 회전) 디지털 전위차계에 낮은 U / D 레벨이 적용됩니다. 직교 디코더는 AD5220에 대한 동기식 클록 신호를 동시에 생성합니다. 클록 펄스 폭의 선형 변화는 RBIAS를 조정함으로써 수행된다.
직교 신호를 디코딩하는 것 외에도 각도 위치 LS7084는 또한 클록 생성을 통해 노이즈, 진동 및 기타 과도 효과에 대한 필터링을 제공합니다. 이 기능은이 유형의 장치에 중요합니다. 광학 엔코더와 달리 RE11CT-V1Y12-EF2CS는 스위치의 금속 접점의 불완전한 특성으로 인해 샤프트의 회전으로 인해 강한 충격이나 소음이 발생할 수있는 저비용 전기 원형 엔코더입니다. LS7084는 이러한 종류의 간섭이 AD5220 디지털 포텐쇼미터로 전송되는 것을 방지합니다.
장치 작동 원리는 매우 간단합니다. 모터 샤프트가 시계 방향으로 회전하면 디지털 전위차계의 가변 저항 값이 최대 값에 도달 할 때까지 단자 B1과 RWB1 사이의 저항이 증가합니다. 같은 방향으로의 추가 샤프트 회전은 출력 임피던스에 영향을 미치지 않습니다.
유사하게, 샤프트가 반 시계 방향으로 회전 할 때, 단자 B1과 RWB1 사이의 저항은 저항이 0에 도달 할 때까지 감소하고, 동일한 방향으로 샤프트의 추가 회전은 효과가 없다.
문학.
1. Peter Khairolomour, 아날로그 장치, 산호세, CA 2003 년 3 월 6 일
2. 라디오 다이어그램, No. 4/2011 lipen-sickle
다음 샘플로 나는 디지털 포텐쇼미터의 배치를 받았다 아날로그 장치. 흥미롭고 유망한 일입니다. AD8400 / AD8402 / AD8403 라인을 알아 내려고 노력할 것입니다. 그들은 하나의 칩에있는 전위차계의 수 (1, 2 및 4) 만 서로 다릅니다. AD8402를 얻었습니다. 하나의 칩에 두 개의 R이 있습니다. 데이터 시트에서 플로우 차트를 볼 수 있습니다. 모든 것이 간단합니다. 방금 직접 가변 저항 구현
표시되지 않았습니다. 인터넷의 다이어그램으로이 차이를 채울 것입니다.
그림에서 볼 수 있듯이 저항 요소 Rh-Rl N-1 저항과 MOS 트랜지스터 형태의 스위칭 키의 N (용량)으로 구성됩니다. 내 경우에는-N \u003d 256이며 지금부터 나는 이것을 의미 할 것이다.
. 디코더 코드는 회로에 연결된 "슬라이더"를 정의합니다 Rw 해당 MOS 트랜지스터를 통해 255 개의 직렬 연결된 저항의 연결 지점. 전위차계의 의존성이 선형 인 경우 (필자의 경우와 같이) 저항 선을 구성하는 저항 값은 동일합니다. 왼쪽 그림의 기호는 데이터 시트의 기호와 일치합니다. Rh-\u003e A, R1-\u003e B 및 Rw-\u003e W.
설치 명령은 직렬 10 비트 SPI 인터페이스에서 수신됩니다.
다음으로, 돌의 핀아웃을보십시오.
데이터 시트의 그림 :
AGND -아날로그 "접지";
A2-B2 -제 2 저항기의 저항 소자;
2 주차 -제 2 저항기의 슬라이더;
DGND -디지털 "지구";
SHDN -두 저항 슬라이더의 하드웨어 설치 신호를 최소값으로;
CS -표준 "결정 선택";
SDI -시리얼 데이터 입력;
CLK -직렬 인터페이스의 클록 신호;
RS -평균 값의 두 저항 슬라이더의 하드웨어 설치 신호;
Vdd -+ 영양;
1 주차 -제 1 저항기의 슬라이더;
A1-B1 -첫 번째 저항의 저항 요소.
이제 제어 단어 구조는 동일한 데이터 시트에서 가져 왔습니다.
단어는 10 자리 숫자로 구성됩니다. A1 과 A0 설정 값의 바이트가 전송되는 저항기 (00-1, 01-2)를 결정 D7-D0 보시다시피 복잡한 것은 없습니다.
브레드 보드
보드에서 ATtiny2313에 대한 이전 디버깅 모듈을 설계했습니다.  그리고 코드를 작성했습니다 :
그리고 코드를 작성했습니다 :
| #포함 |
이제 플로우 차트로 돌아갑니다. 그녀를 다시 한 번 봐봐 우리는 저항 소자의 출력 중 하나에 기준 전압을 적용하고 ... DAC는 디지털-아날로그 변환기입니다! 그리고이 기능을 위해 코드가 작성되었습니다-오실로스코프로 칩의 작동을 관찰하는 것이 좋습니다. 음, 저항계로 확인하려면 지연을 주석 해제하십시오. 그러면 저항의 변화를 볼 수 있습니다.
그리고 마지막으로, 연구 자체.
SHDN 및 RS 신호의 올바른 작동뿐만 아니라 디지털 포텐쇼미터가 저항계와 함께 작동하는지 확인한 후 위에서 언급 한 0.5 초 지연을 언급하고 칩 동작을 찾기로 결정했습니다.
1. 칩 자체의 전원 공급 장치에서 직접 저항으로의 전압 공급, 즉 전기적으로 묶이지 않았습니다. 사진이 이렇게 밝혀졌습니다.

