Digitaalinen potentiometri on muuttuva vastus, jonka harjan asento voidaan asettaa ohjelmallisesti mikro-ohjaimella. Joskus se on erittäin kätevää, laitetta ei tarvitse purkaa ja trimmeriä kääntää. Yleensä niitä käytetään äänenvoimakkuuden säätöpiireissä, ADC-viitejännitteessä, vahvistuksessa, LCD-kontrastissa, taajuuskorjauksissa ja paljon muuta. Digitaaliset potentiometrit voivat useimmissa tapauksissa korvata melko hyvin mekaaniset vastineensa. Se ostettiin, jotta kiusattiin tutkia hienoa yksityiskohtaa. Hänestä ja siitä keskustellaan.
Laitteen tärkeimmät ominaisuudet:
- Impedanssi - 10 kOhm
- Harjan vastus - 52 ohm
- Syöttöjännite 2,7 V - 5,5 V
- Harjapaikkojen määrä - 256
- Lämpötila-alue -40…+85 °C
- Käyttöliittymä - SPI
Nämä ominaisuudet on annettu kohdassa. Todellisuudessa potentiometrin impedanssi oli 8,7 kOhm. Mutta tämä luku sopii tietolomakkeessa annettuihin enimmäisarvoihin, joten ei ole mitään hätää. Muuten, on vielä kaksi täsmälleen samaa potentiometriä, mutta resistanssilla 50 kOhm ja 100 kOhm. On myös kaksi potentiometriä, joilla on samanlaiset ominaisuudet. Tämän potentiometrin harjan asentoa ei muisteta, ja jos tämä on tarpeen, niin tämä on toteutettava ohjelmistossa. Virran kytkemisen jälkeen harja nousee aina keskiasentoon.
Potentiometrin ohjaus
Tätä laitetta ohjataan hieman katkaistun SPI:n kautta. MISO-linjaa ei ole, koska Potentiometristä ei voi lukea mitään, se voidaan vain kirjoittaa. Potentiometrin kanssa työskentelyn algoritmi on helppo häpeä:
1) Aseta CS-osuus matalalle logiikkatasolle
2) Lähetä haluamasi komento
3) Lähetä datatavu
4) Aseta CS-osuus korkealle logiikkatasolle
Katsotaanpa tarkemmin komentotavua:

Bitit C1 ja C0 ovat suoritettavan komennon valintaa varten. Niitä on vain kaksi, NOP:ta lukuun ottamatta. Miksi tarvitsen tyhjän komennon, en ymmärtänyt tietolomakkeesta.

P1 ja P0 valitsevat potentiometrin, jolla komento suoritetaan. Koska minun potentiometri ei ole kaksinkertainen, niin P1-bitti on minulle täysin hyödytön.

Ohjausohjelmiston virheenkorjaus tapahtui uudessa . Se oli hänen ensimmäinen tulikaste. :-) Liitin potentiometrin säätimeen seuraavasti:
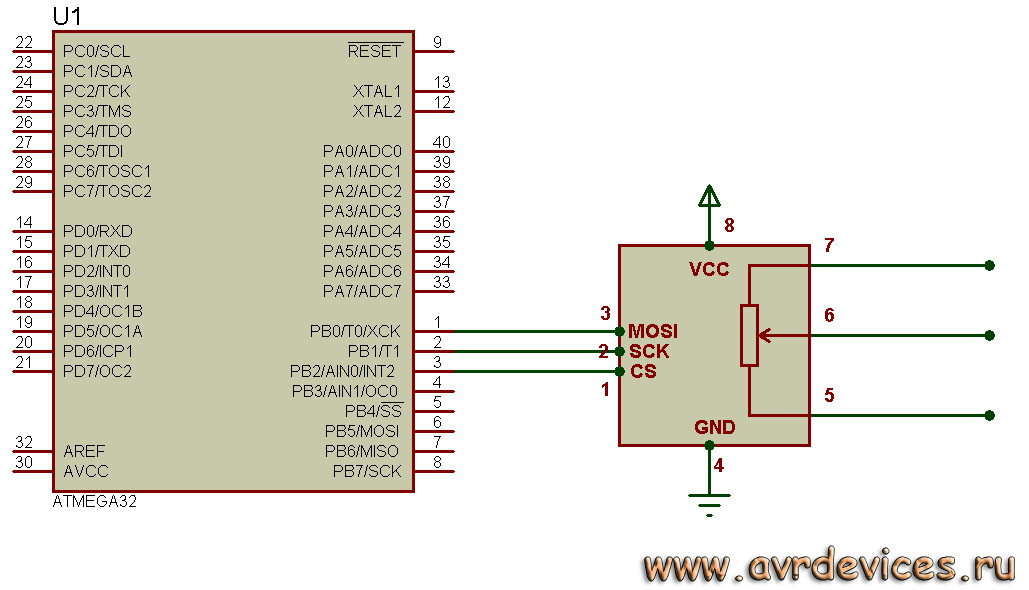
Potentiometrin seitsemännen ja kuudennen navan väliin on kytketty yleismittari, joka näyttää vastuksen muutoksen. Siellä on myös kaksi painiketta, jotka sulkevat nastat 4 ja 5 maahan (unohdin piirtää sen kaavioon). Ompelemalla laiteohjelmiston ohjaimeen, voit kokeilla (kuvaan tällaisia videoita ensimmäistä kertaa, joten älä potkaise paljon):
Kaikki on yksinkertaista. Rakastan assembleria =) En tunne C:tä kovin hyvin.
Korkean tason ohjelmointikielistä pidän mieluummin micropascalista.
Hyvää päivää. Anna minulle koordinaattisi (sähköposti).
Lähetän sinulle erinomaisen kirjan (venäjäksi) C:llä AVR:lle,
ja 100 % toimiva Asenna CVAVR. Ja sinä kuukauden kuluttua (tai jopa aikaisemmin)
levität C:tä (ja hymyilet menneelle). Varsinkin tyylikkäällä ulkoasullasi...
Kehityksen nopeus, paljon valmiita kirjastoja - tämä on syy jättää ASMa. …Tämä on AVR:lle, PIC:lle jne.
Ja tietokoneen puolelta (Widows) - nopeaa käyttöönottoa varten suosittelen -DELPHIä.
"KAUKASUS - äitien huuto", - on omistettu ensimmäiselle Tšetšenian sota 1995-1996
(ja minulle henkilökohtaisesti KAUKASUS on rakas armeijassa vietetyille vuosille Pohjois-Ossetia 1981-1985).
Edistys ei ole ohittanut paitsi polkupyörää. Nykyään perinteiset säädettävät ja trimmerivastukset väistyvät monissa sovelluksissa digitaalisille vastuksille. Englanninkielisissä lähteissä niitä kutsutaan nimellä digital potentiometer, RDAC tai digiPOT. Näiden laitteiden soveltamisala on paljon laajempi kuin tasonsäätö äänimerkki. Erityisesti he tulevat apuun hyvin monissa tapauksissa, kun on tarpeen muuttaa parametreja. palautetta jota on vaikea toteuttaa perinteisillä DAC:illa.
Niiden käyttö on erityisen tehokasta operaatiovahvistimien yhteydessä. Saat siis säädettävät vahvistinasteet, erilaisten suureiden muuntimet, suodattimet, integraattorit, jännite- ja virtalähteet ja paljon muuta. Sanalla sanoen, nämä erittäin edulliset ja kompaktit laitteet voivat olla hyödyllisiä jokaiselle elektroniikan kehittäjälle ja radioamatöörille ...
Aluksi halusin kirjoittaa lyhyen artikkelin, mutta aiheen syvällisen tutkimisen tuloksena materiaali tuskin mahtui kahteen osaan. Tänään yritän puhua näiden laitteiden arkkitehtuurista, niiden ominaisuuksista, käytön rajoituksista ja kehitystrendeistä. Lopuksi käsittelen lyhyesti sovellusalueita, koska konkreettisia esimerkkejä niihin perustuvien järjestelmien käytännön toteutuksesta tarkastellaan toisessa osassa. PALJON esimerkkejä!
Henkilökohtaisesti olen viimeisen viiden vuoden aikana soveltanut menestyksekkäästi digitaalisia vastustuksia useissa kehitystöissäni, toivon, että tämä artikkelisarja on hyödyllinen monille ja auttaa ratkaisemaan monia ongelmia tyylikkäämmin ja yksinkertaisemmin kuin nykyään. Ihmisille, jotka ovat kaukana elektroniikan kehittämisestä, tämä artikkeli voi yksinkertaisesti laajentaa heidän näköalojaan osoittamalla, kuinka jopa niin yksinkertaiset asiat kuin muuttuvat vastukset kehittyvät digitaalitekniikan hyökkäyksen alaisena.
P.S. Sattui niin, että se on jo ilmestynyt ja siinä on vain yksi esimerkki, mutta sitä analysoidaan yksityiskohtaisesti. Muille luvatuille esimerkeille sinun on kirjoitettava kolmas.
Arkkitehtuuri.
Ymmärtääksemme, kuinka tämä laite toimii, siirrytään toiminnalliseen kaavioon. Se näyttää digitaalisen 8-bittisen vastuksen analogisen osan.
Laitteen perustana on 255 samanarvoista vastusta ja CMOS-tekniikalla valmistetut kaksisuuntaiset elektroniset kytkimet. Digitaalinen arvo alueella 0-255 kirjoitetaan rekisteriin, josta se syötetään dekooderille. Rekisteriin tallennetusta arvosta riippuen aktivoidaan yksi kytkimistä, joka yhdistää keskilähdön W valittuun pisteeseen lineaariresistanssimatriisissa Rs. Kahdella lisänäppäimellä liitetään ääripäätteet A ja B. Niiden avulla laite voi siirtyä inaktiiviseen tilaan.
Johtopäätökset A ja B ovat analogeja muuttuvan resistanssin äärimmäisistä liittimistä, W on keskimmäinen liitin, johon moottori on kiinnitetty tavanomaisiin säädettäviin vastuksiin.

Mahdolliset kytkentäpiirit ovat myös samanlaisia kuin perinteiset muuttuvat vastukset ...
Harkitse, kuinka vaadittu resistanssi asetetaan 10 kiloohmin vastuksen esimerkillä. Aluksi lasketaan kunkin sellaisen kokoonpanovastuksen arvo, joka tarvitaan tällaisen resistanssin muodostamiseen Rs=10000/256=39,06 Ohm. Oletetaan, että yritämme säätää vastusta W- ja B-nastojen välillä. Nollaa varten kirjoitamme tämän arvon ohjausrekisteriin, mutta halutun nollan sijaan saamme 100 ohmin resistanssin. Miksi? Tosiasia on, että laitteen jokaisella koskettimella on oma sisäinen vastus ja tässä tapauksessa se on 50 ohmia, joten tällä potentiometrillä saavutettava vähimmäisarvo ei ole nolla, vaan sata ohmia - resistanssi koskettimet W ja B. Kirjoittamalla rekisteriyksikköön saadaan 50 + 50 + 39 \u003d 139 ohmia.
Yleensä voit laskea W- ja B-nastan välisen resistanssin D-rekisterin arvosta riippuen kaavalla:
![]()
- D - rekisteriarvo 0 - 255
- Rab - nimellisvastus
- Rw - yhden koskettimen vastus

liitännät.
Harkitse nyt koko laitteen, jossa on I2C-liitäntä, toimintakaaviota.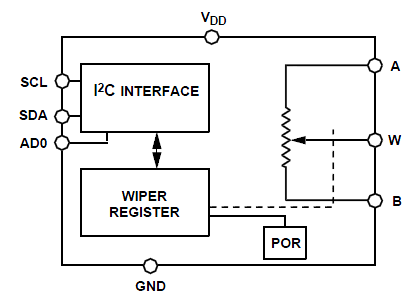
Tässä vain AD0-lähtö voi aiheuttaa kysymyksiä. Se on suunniteltu mahdollistamaan kahden potentiometrin samanaikainen käyttö yhdessä I2C-kanavassa. Riippuen siitä, onko se looginen nolla vai yksi, laiteosoite I2C-väylällä muuttuu. Kaava kahden mikropiirin liittämiseksi yhteen väylään on esitetty alla.

Näiden laitteiden ohjaamiseen käytetään usein I2C-liitännän lisäksi SPI-liitäntää. Tässä tapauksessa on myös mahdollista ohjata useita laitteita samalla väylällä. Tätä varten ne yhdistetään ketjuksi. Esimerkiksi näin:
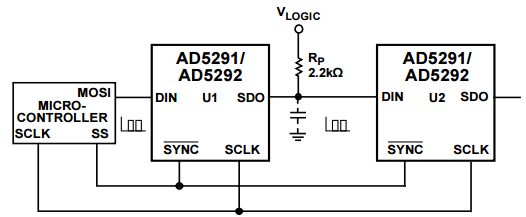
Tässä tilassa puskurirekisteri arvojen kirjoittamista varten toimii siirtorekisterinä. Jokainen uusi bitti tulee DIN-sisääntuloon ja kirjoitetaan sen vähiten merkitseväksi bitiksi SCLK:n avulla. Samaan aikaan merkittävin bitti menee ulos SDO-nastan kautta ja siirtyy ketjun seuraavaan laitteeseen. Kun tiedot on kirjoitettu kaikkiin laitteisiin, saapuu SYNC-vilkkupulssi, jonka mukaan kaikkien ketjuun kuuluvien laitteiden rekisterien uudet arvot kirjoitetaan puskurista työrekisteriin. Tällaisen ratkaisun ilmeinen haittapuoli on, että tietoja ei voi kirjoittaa yhteen laitteeseen. Mahdollisista arvojen muutoksista on päivitettävä koko ketjun rekisterien sisältö.
Tällaisten ongelmien ratkaisemiseksi sekä ratkaisun lopullisen hinnan säästämiseksi tehdään mikropiirejä, jotka sisältävät kaksi, neljä ja jopa 6 digitaalista vastusta samanaikaisesti.
Käyttöjännite ja virta
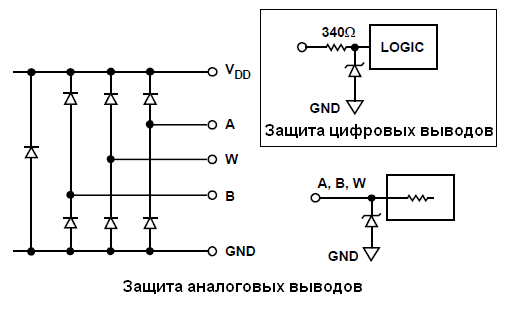
Varhaisten mallien ehkä merkittävin haittapuoli oli johtojen rajoitettu jännite. Se ei saisi ylittää syöttöjännitettä, joka voi olla alueella 2,7 - 5,5 V, ja mikä tärkeintä, se ei voinut mennä negatiiviselle alueelle, minkä vuoksi mikropiirien käyttö rajoitettiin laitteisiin, joissa on yksinapainen virtalähde. Ensinnäkin insinöörit ratkaisivat kaksinapaisuuden ongelman. Näin ilmestyi laitteita, jotka voivat toimia sekä yksinapaisesta jännitteestä 5,5 volttiin asti että tukea kaksinapaista virtalähdetilaa ± 2,75 V:iin asti. Sitten alkoi ilmestyä versioita, joiden maksimivirtalähde oli ±5,5 ja jopa ±16,5 (jopa 33 volttia unipolaarista AD5291/5292:lle). Tietenkin tässä parametrissa perinteiset vastukset voittaa edelleen paljon, mutta suurimmalle osalle piireistä 33 volttia riittää.Siitä huolimatta, mitä maksimijännitettä laite tukee, jos on mahdollista ylittää sallitut rajat, tulee käyttää ainakin yksinkertaisinta suojausta diodien tai vaimentimien avulla.
Toinen vakava ongelma on digitaalisten vastusten alhainen maksimikäyttövirta, joka johtuu ensisijaisesti niiden pienestä koosta. Ilman ajan kuluessa tapahtuvan heikkenemisen riskiä, keskimääräinen tasavirta useimpien mallien ei saa ylittää 3 mA. Jos virtaava virta on pulssi, sen maksimiarvo voi olla suurempi.
Taistele tarkkuudesta. Hallittu kaaostekniikka
Valitettavasti olemassa oleva valmistustekniikka mahdollistaa digitaalisissa vastuksissa käytettävien integraalisten vastusten resistanssin poikkeamat, jopa 20 prosenttia nimellisarvosta. Yhden erän sisällä, ja vielä enemmän yhdessä tietyssä laitteessa, vastusero ei kuitenkaan ylitä 0,1 %. Asennuksen tarkkuuden parantamiseksi valmistaja alkoi mitata vastusten resistanssia ainakin jokaisessa levyssä ja rekisteröidä jokaisen mikropiirin haihtumattomaan muistiin ei nimellisvastus, vaan todellinen vastus, joka saatiin aikana. tuotantoa 0,01 prosentin tarkkuudella. Samanlainen mekanismi mahdollistaa erityisesti AD5229 / 5235-mikropiireissä laskea resistanssin asettamisen todellisen tarkkuuden virheellä, jota ei voida saavuttaa jopa monikierrosviritysvastuksessa - 0,01 prosenttia. Tämän perusteella on mahdollista korjata digitaalisen koodin resistanssiksi dekoodauksen toiminta. Oletetaan, että alkuainevastuksen arvo on 100 ohmia. Sitten, jos haluat asettaa resistanssin arvoon 1K, asetat digitaaliseen rekisteriin 10. Mutta jos todellisessa laitteessa resistanssit poikkeavat nimellisarvosta ylöspäin ja ovat 110 ohmia, niin tasolla 10 saa 1.1K. Luettuaan resistanssin todellisen arvon mikrokontrolleri voi kuitenkin laskea koodin uudelleen ja lähettää dekooderille koodin 9 sijasta 10. Silloin saadaan todellisuudessa 9 * 110 = 990 ohmia.Lisäksi AD on patentoinut tekniikan resistanssiarvon kalibroimiseksi 1 %:n tarkkuudella. Valitettavasti en löytänyt tietoa sen toimintamekanismista.
Resistanssiasetuksen diskreettisyyden lisäämiseksi kehitettiin laitteita, joissa on 10-bittinen dekooderi, jotka tarjoavat 1024 säätövaihetta. Tämän parametrin lisäys voidaan saavuttaa käyttämällä kahden digitaalisen vastuksen sarja- tai rinnakkaiskytkentää, joilla on eri arvot.
Lämpötilan vakaus
Ei täällä kaikki ole huonosti. Kalvotekniikoilla valmistettujen vastusten käyttö mahdollistaa drift-tason saavuttamisen, joka ei ylitä 35 ppm/°C (0,0035 %). On lämpötilakompensoivia laitteita, joiden lämpötilapoikkeama on tasolla 10ppm/°C. Tässä parametrissa digitaaliset vastukset ovat parempia kuin monet moottorin analogit. Sovelluksiin, joissa tämä parametri ei ole relevantti, voit valita halvempia puolijohdevastuksilla varustettuja laitteita, joiden poikkeama on 600 ppm/°C.Useimpien ADI-instrumenttien käyttölämpötila-alue on -40°C ja +125°C välillä, mikä riittää valtaosaan sovelluksista.
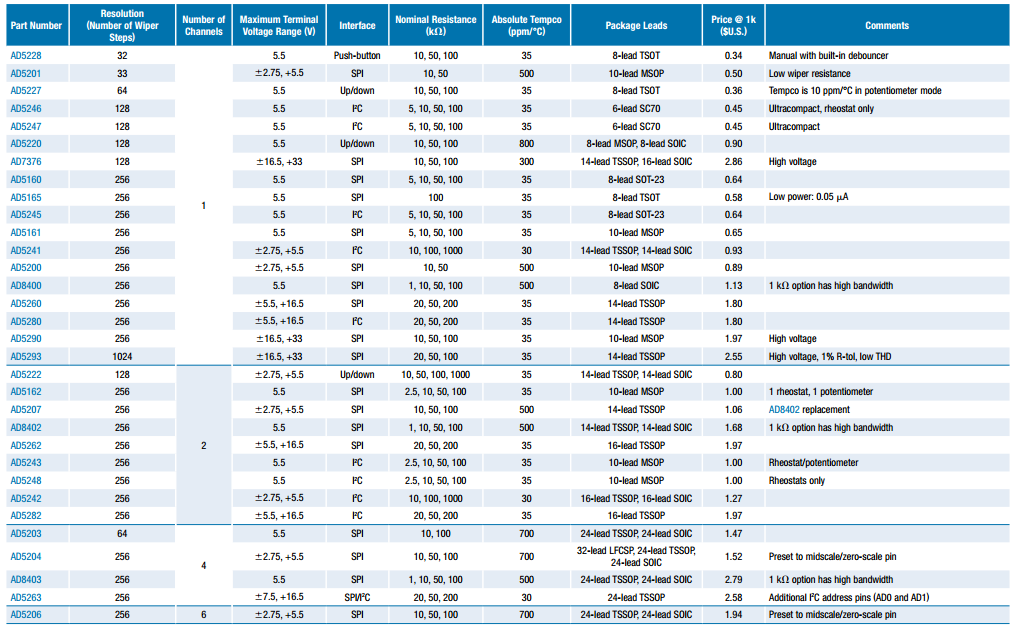
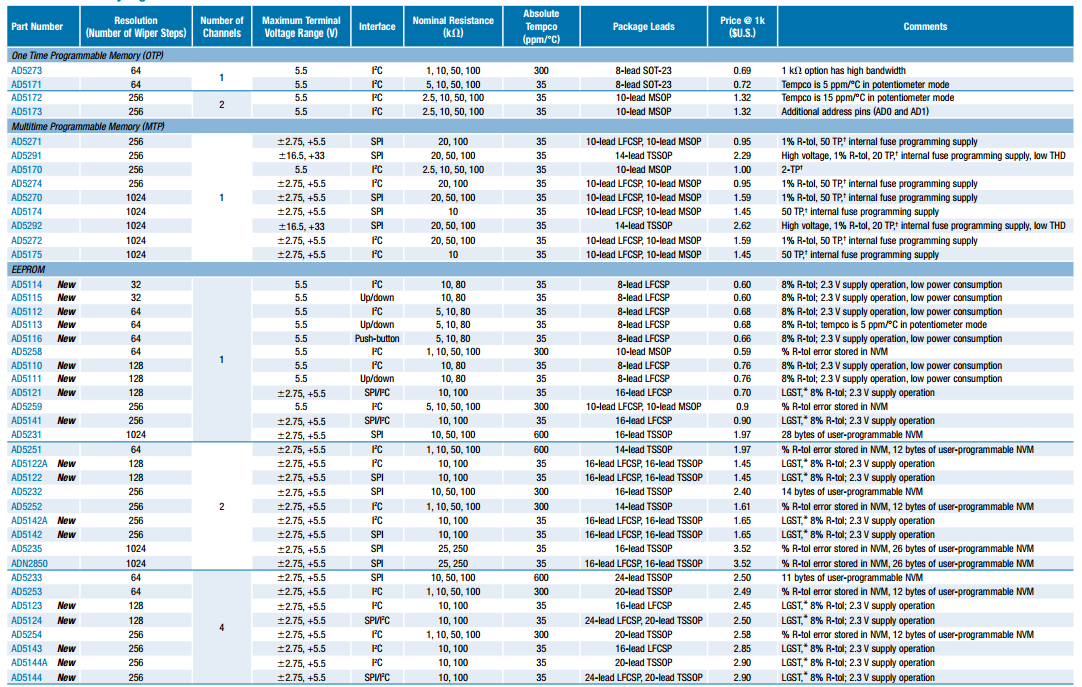
Valikoima saatavilla olevia vastusvaihtoehtoja.
Tietenkään täällä ei ole niin laajaa valikoimaa kuin perinteisillä liukuvastuksilla, mutta valinnanvaraa on paljon. Alla oleva taulukko havainnollistaa käytettävissä olevien vastusten riippuvuutta laitteen kapasiteetista.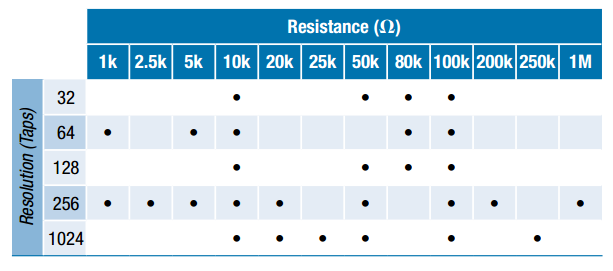
Signaalin vääristymä
Digitaalisten vahvistimien aiheuttamat tärkeimmät vääristymät voidaan jakaa kahteen luokkaan.- Harmoninen särö tai länsimainen kokonaisharmoninen särö (THD).
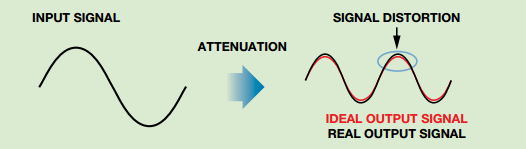
Nämä vääristymät lisääntyvät käytetyn jännitteen kasvaessa. Voit saada käsityksen niiden tyypillisistä arvoista seuraavasta AD9252-siruille kootusta taulukosta...

Joissakin tapauksissa tämän tyyppinen särö voi kasvaa jopa -60 dB:iin
Tämän vaikutuksen vaikutus lisääntyy laitteen vastuksen kasvaessa. Alla olevasta taulukosta käy ilmi, millä taajuudella signaali vaimenee 3 desibeliä eri vastusarvoilla.

Selvyyden vuoksi annan myös kaavioita signaalin siirron riippuvuudesta asetetusta resistanssitasosta AD5291-mikropiireille, joiden arvot ovat 20 ja 100 kiloohmia.

Siten käy ilmi, että mitä suurempi vastusarvo, sitä pienempi sen toimintataajuus.
Evoluution "siruja".
Valmistajat yrittävät tehdä laitteen kanssa työskentelystä mahdollisimman mukavaa keksimällä erilaisia miellyttäviä pieniä asioita. Tämän seurauksena digitaaliset vastukset ovat saaneet sisäisen haihtumattoman muistin, sekä kerran että toistuvasti ohjelmoituna.Sen päätarkoitus on tallentaa alkuperäinen vastusarvo, joka asetetaan automaattisesti heti virran kytkemisen jälkeen. Ensimmäiset elektronisten vastusten mallit asetettiin, kun virta kytkettiin keskiasentoon, sitten ilmestyi ylimääräinen jalka nollaamista varten, minkä jälkeen tasoa voitiin asettaa muistiin tallennetun arvon avulla. Edistyneimmissä malleissa useita esiasetettuja arvoja voidaan tallentaa muistiin, joiden välillä käyttäjä voi vaihtaa nopeasti painikkeita painamalla.

Lisäksi on ilmestynyt liitäntä enkooderien kytkemistä varten.
Mitä muuta parannettavaa?
Voidaan haaveilla, mihin suuntaan digitaalisten vastusten tuotannon kehitys kehittyy.Suuremman tarkkuuden saavuttamiseksi kytkentäjärjestelmä voi muuttua.
Esimerkiksi lisäämällä vain yksi vastus rinnakkaiskytkentään perinteiseen piiriin, no, kaksi. Yläolkapäässä vielä yksi symmetriaa varten - voit kaksinkertaistaa vastuksen asetuksen tarkkuuden! Kahden laitteen yhdistäminen samaan koteloon mahdollistaa moninkertaisuuden lisäämisen ja tarkkuuden.

Yksinkertaisimman dekooderia ohjaavan mikro-ohjaimen käyttöönotto koteloon mahdollistaa saatujen vastusten todellisen arvon perusteella kytkentäohjelman luomisen laitteen vastuksen asettamiseksi erittäin suurella tarkkuudella - 0,1% tai enemmän. Integroimalla lämpötila-anturi tällaisiin laitteisiin voidaan ottaa käyttöön kompensointi lineaarisuuden ylläpitämiseksi hyvin laajalla alueella. lämpötila-alue. On mahdollista, että HiFi-laitteiden taajuuskompensoitujen vastusten analogit ilmestyvät, jotka ovat useita vastuksia yhdessä tapauksessa. Yhtä niistä käytetään äänenvoimakkuuden säätämiseen ja toisia taajuuden kompensointiin.
Käyttöalueet
Annan artikkelin seuraavassa osassa erityisiä digitaalisiin resistanssiin perustuvia piiriratkaisuja, toistaiseksi harkitse vain sovellusalueita.Tietenkin muuttuvavahvistimet tulevat ensin mieleen.
Asetusarvojen tarkkuuden lisäämisen seurauksena tuli mahdolliseksi käyttää elektronisia vastuksia instrumentaalivahvistimien vahvistuksensäätöpiireissä.

Nestekidenäytön kontrastin automaattinen tai ohjelmistomuutos voidaan järjestää käyttämällä elektronista vastusta, jonka nimellisarvo on 10 kiloohmia.

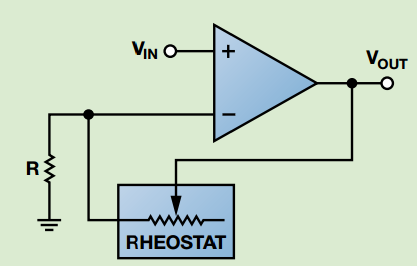
Digitaalisten vastusten perusteella on helppo toteuttaa ohjattuja suodattimia. Korkealuokkaiset suodattimet vaativat usein useita samanarvoisia vastuksia. Tämä on erittäin kätevää toteuttaa laitteilla, jotka sisältävät useita vastuksia yhdessä paketissa, koska tässä tapauksessa saamme erinomaisen toistettavuuden. Kuvassa on yksinkertaistettu kaavio yksinkertaisimmasta ohjatusta LPF:stä.

Logaritminen vahvistin, suhteellisen korkealla syöttöjännitteellä, perustuu AD5292:een.

Ohjelmistoohjattu jännitteensäädin.

Lineaarinen alue ADI:sta
Lopuksi annan täydellisen luettelon elektronisista potentiometreistä, jotka ovat saatavilla tänään Analog Devicesilta. On huomattava, että tällaisia laitteita ei tuotettu vain tämä yritys. Esimerkiksi MAXIM on myös tehnyt hyviä siruja pitkään.Ensinnäkin kalusteet, jotka eivät tue käyttäjän ohjelmointia.
Lopuksi ohjelmoitavat laitteet. Kun valitset tiettyä mallia, sinun tulee kiinnittää huomiota siihen, että ne ovat molemmat kertaohjelmoitavia ja tukevat uudelleenohjelmointia. Lisäksi vain EEPROM-tekniikalla tehdyt muistilla varustetut mikropiirit tarjoavat suuren määrän syklejä.
Tämä päättää tarkastelun. Seuraava artikkeli on omistettu digitaalisia resistanssia käyttävien käytännön piirien tarkasteluun.
P.S. Sattuu vain niin, että se on jo ulkona
Erilaisten piirien testaamiseksi kuormituksen alaisena radioamatööri tarvitsee usein suuren varaston vastuksia, joilla on eri luokitukset ja vastaavasti erilaiset kapasiteetit. Päästä eroon isosta testivastuksen sarjasta auttaa sinua elektroninen vastus, jonka kaavio on esitetty alla.
Tämä järjestelmä auttaa erityisesti perustamaan virtalähde: selvitä millä kuormituksella aaltoilu kasvaa, lähtöjännitteen arvo muuttuu, se auttaa sinua asettamaan elektronisen ylikuormitussuojan jne.
Tyhjä kuormituspiiri erittäin yksinkertainen. Piirin pääelementti on MOSFET-N-transistori. Virrankulutusta säädetään muuttamalla hilajännitettä potentiometrillä R2. MOSFETin resistanssi vaihtelee hilajännitteen mukaan. Jännite potentiometrin tulossa on vakaa Zener-diodin VD1 ansiosta.
Yksinkertainen valekuormituspiiri


Jotta voit testata lähteen pienellä lähtöjännitteellä, sinun on käytettävä loogista MOSFETiä (MOSFET on suunniteltu siirtymään logiikkatasolta). Siinä on matalampi kynnysjännite ja voit testata virtalähteitä, joiden jännite on enintään 4 V. Logiikkatransistoreille sopii 5 V zener-diodi, klassiseen MOSFETiin - 9 V. MOSFETit on asetettava iso jäähdytin. TO220-paketin transistorin lyhytaikainen kuormitus voi olla 100 wattia. Se voi toimia jatkuvasti jopa 50 W:n kuormalla suurella jäähdyttimellä. Tämä toimii tulojännitealueella 4 - 25 V. Logiikkatransistoreilla on tyypillisesti DS-nastojen välinen maksimijännite 30 V.
Muuttuva vastus digitaalisella ohjauksella. Tämä laite toimii samoin elektroninen toiminto säätö mekaanisena potentiometrinä tai säädettävänä vastuksena. Resistanssi muuttuu diskreetti, kun kellopulssi syötetään laskentatuloon CLK, laskentasuunta (resistanssin kasvu tai lasku) määräytyy YLÖS/ALAS-tulon signaalitason mukaan.
Saatavilla on 128 erillistä vastusarvoa, potentiometrien nimellisalue on 10, 50 ja 100 kOhm.
Päällä kuva 1 näyttää digitaalisen potentiometrin toimintakaavion. Kun nimellisarvo on 10 kOhm, vastus napojen A ja B välillä on vakio ja on 10 kOhm, ja vastuksen lisäys on yhtä suuri:
R STEP - 10 kOhm / 128 - 78 Ohm.
Tyypillinen syöttöjännite on 5 V, virrankulutus enintään 40 μA.
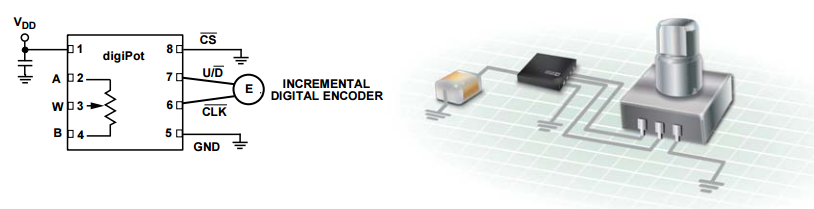
Pin-määritys näkyy kohdassa kuva 2.
Päällä kuva 3 näyttää tyypillisen kytkentäkaavion digitaaliselle potentiometrille AD5220.

Riisi. 4. Kytkentäkaavio pyöreän anturin kanssa
Päällä kuva 4 näyttää digitaalisen potentiometrin AD5220 käytön liitäntäpiirissä, jossa on pyöreä moottorin akselin asentoanturi RE11CTV1Y12-EF2CS. Järjestelmän on kehittänyt P. Kairolomuk (Kalifornia, USA). Pyörivä anturi muuntaa akselin kulma-asennon koodiksi, joka syötetään kvadratuuridekooderille (LS7084 - 90° vaihesiirtodekooderi). Dekooderi tuottaa CLK- ja U/D-ohjaussignaalit digitaaliselle potentiometrille.
Signaalit A ja B ( kuva 5) pyöreä kooderi kulkee kvadratuuridekooderin läpi, joka muuntaa A- ja B-signaalien välisen vaihe-eron CLK- ja U/D-ohjaussignaaleiksi AD5220:lle. Kun signaali B johtaa signaalia A (moottorin akseli pyörii myötäpäivään), digitaalinen potentiometri vastaanottaa korkeatasoinen U/D. Kun signaali A johtaa signaalia B (moottorin akseli pyörii vastapäivään), digitaalinen potentiometri ohjataan matalalle U/D:lle. Kvadratuuridekooderi generoi samanaikaisesti synkronisen kellosignaalin AD5220:lle. Kellon leveyden ramppi suoritetaan säätämällä RBIAS:a.
Kvadratuurisignaalien dekoodauksen lisäksi kulmikas asento ja kellon sukupolvi, LS7084 tarjoaa myös suodatuksen kohinan, värinän ja muiden ohimenevien vaikutusten varalta. Tämä ominaisuus on tärkeä tämän tyyppisille laitteille. Toisin kuin optiset enkooderit, RE11CT-V1Y12-EF2CS on halpa sähköinen pyöreä anturi, jossa mikä tahansa akselin pyöriminen voi aiheuttaa voimakkaan iskun tai häiriöäänen kytkimen metallikoskettimien epätäydellisyyden vuoksi. LS7084 estää tällaista kohinaa siirtymästä AD5220 digitaaliseen potentiometriin.
Laitteen toimintaperiaate on hyvin yksinkertainen. Kun moottorin akseli pyörii myötäpäivään, vastus napojen B1 ja RWB1 välillä kasvaa, kunnes digitaalisen potentiometrin muuttuvan resistanssin arvo saavuttaa maksimiarvon. Akselin jatkaminen samaan suuntaan ei vaikuta lähtöimpedanssiin.
Vastaavasti kun akselia kierretään vastapäivään, vastus napojen B1 ja RWB1 välillä pienenee, kunnes vastus saavuttaa nollan, eikä akselin jatkamisella samaan suuntaan ole vaikutusta.
Kirjallisuus.
1. Peter Khairolomour, Analog Devices, San Jose, CA, 6. maaliskuuta 2003
2. Radiokaavio, nro 4/2011 lime-serpen
Seuraavina näytteinä sain erän digitaalisia potentiometrejä Analogiset laitteet. Jotain mielenkiintoista ja lupaavaa. Yritän käsitellä AD8400/AD8402/AD8403-linjaa. Ne eroavat toisistaan vain yhden sirun potentiometrien lukumäärässä: 1, 2 ja 4, vastaavasti. Sain AD8402, ts. kahdella R:llä yhdessä sirussa. Voit nähdä lohkokaavion tietolomakkeesta - kaikki on siellä yksinkertaista. Mutta suoraan muuttuvan vastuksen toteutus
ei näytetty. Täytän tämän aukon Internetin kaaviolla:
Kuten kuvasta voidaan nähdä, resistiivinen elementti Rh-Rl koostuu N-1 vastuksesta ja N (tämä on sen kapasiteetti) kytkentäavainta MOSFET:ien muodossa. Minun tapauksessani - N = 256, ja edelleen tarkoitan sitä
. Dekooderin koodi määrittää piiriin kytketyn "liukukappaleen". Rw sopivan MOSFETin kautta, 255 sarjakytketyn vastuksen liitäntäpiste. Jos potentiometrin riippuvuus on lineaarinen (kuten minun tapauksessani), linjan muodostavien vastusten vastusarvot ovat samat. Huomaan, että vasemmalla olevan kuvan symbolit vastaavat tietolomakkeen symboleja: Rh -> A, Rl -> B ja Rw -> W.
Asennuskomennot vastaanotetaan 10-bittisen SPI-sarjaliitännän kautta.
Katsotaanpa seuraavaksi kiven kärkeä.
Kuva tietolomakkeesta:
AGND- analoginen "maa";
A2-B2- 2. vastuksen resistiivinen elementti;
W2- 2. vastuksen liukusäädin;
DGND— digitaalinen "maa";
SHDN- signaali laitteistolle, joka asettaa molempien vastusten liukusäätimet minimiarvoon;
CS- standardi "kidevalinta";
SDI— sarjaliitännän tietojen syöttö;
CLK- sarjaliitännän kellosignaali;
RS- molempien vastusten liukusäätimien laitteistoasetuksen signaali keskiarvoon;
vdd— + ruoka;
W1- 1. vastuksen liukusäädin;
A1-B1- 1. vastuksen resistiivinen elementti.
Nyt ohjaussanan rakenne samasta tietolomakkeesta:
Sana koostuu 10 numerosta. A1 Ja A0 määrittää mihin vastukseen (00 - 1. ja 01 - 2.) asetetun arvon tavu lähetetään D7-D0 liukusäätimelle W. Kuten näette, siinä ei ole mitään monimutkaista.
Leipälauta
Rakensin vanhasta virheenkorjausmoduulilevystä ATtiny2313:lle.  Ja kirjoitti koodin:
Ja kirjoitti koodin:
| #sisältää |
Nyt takaisin lohkokaavioon. Katso sitä uudelleen huolellisesti... Muistuttaako se sinua jostain? Asetamme referenssijännitteen yhteen resistiivisen elementin ulostuloista ja saamme ... DAC - digitaali-analogimuunnin! Ja koodi on kirjoitettu tälle toiminnolle - on parempi tarkkailla mikropiirin toimintaa oskilloskoopilla. No, jos haluat tarkistaa ohmimittarilla, poista viive kommentti. Sitten näet muutoksen vastustuksessa.
Ja lopuksi suora tutkimus.
Tarkastettuani digitaalisen potentiometrin toiminnan ohmimittarilla sekä SHDN- ja RS-signaalien oikean toiminnan kommentoin yllä mainittua puolen sekunnin viivettä ja päätin selvittää itse sirun käyttäytymisen, kun:
1. Jännitteen syöttäminen vastukseen suoraan itse mikropiirin virtalähteestä, ts. ei ole galvaanisesti erotettu. Kuvasta tuli tällainen.

